

In this exercise, we will examine hill climbing in the context of robot navigation, using the environment
Question:
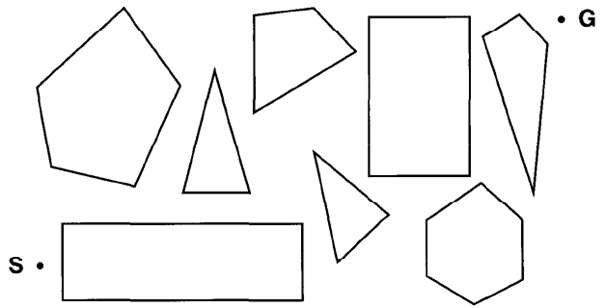
In this exercise, we will examine hill climbing in the context of robot navigation, using the environment in Figure as an example.
a. Repeat Exercise 3.16 using hill climbing. Does your agent ever get stuck in a local minimum? Is it possible for it to get stuck with convex obstacles?
b. Construct a non-convex polygonal environment in which the agent gets stuck.
c. Modify the hill-climbing algorithm so that, instead of doing a depth-i search to decide where to go next, it does a depth-k search. It should find the best k-step path and do one step along it, and then repeat the process.
d. Is there some k for which the new algorithm is guaranteed to escape from localminima?
Step by Step Answer:
Hill climbing is surprisingly effective at finding reasonable i...View the full answer


Artificial Intelligence A Modern Approach
ISBN: 978-0137903955
2nd Edition
Authors: Stuart J. Russell and Peter Norvig
