

Using LabVIEW, the Control Design and Simulation Module, and the Math Script RT Module, open and customize
Question:
Using LabVIEW, the Control Design and Simulation Module, and the Math Script RT Module, open and customize the Interactive Root Locus VI from the Examples to implement the system of Problem 64. Select the parameter KD to meet the requirement of Problem 64 by varying the location of the closed-loop poles on the root locus. Be sure your front panel shows the following: (1) open-loop transfer function, (2) closed-loop transfer function, (3) root locus, (4) list of closed-loop poles, and (5) step response.
Data from Problem 64:
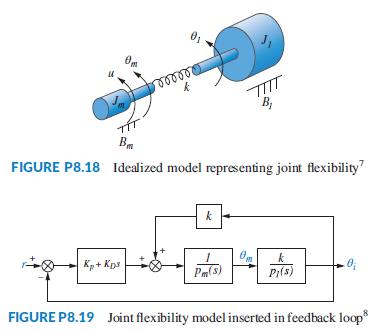
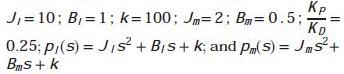
Harmonic drives are very popular for use in robotic manipulators due to their low backlash, high torque transmission, and compact size (Spong, 2006). The problem of joint flexibility is sometimes a limiting factor in achieving good performance. Consider that the idealized model representing joint flexibility is shown in Figure P8.18. The input to the drive is from an actuator and is applied at θm. The output is connected to a load at θl. The spring represents the joint flexibility and Bm and Bl represent the viscous damping of the actuator and load, respectively. Now we insert the device into the feedback loop shown in Figure P8.19. The first block in the forward path is a PD controller, which we will study in the next chapter. The PD controller is used to improve transient response performance.
Use MATLAB to find the gain KD to yield an approximate 5% overshoot in the step response given the following parameters:
Step by Step Answer:
1 Open Interactive Root Locus VI Open LabVIEW Go to the Example Finder to locate the Interactive Root Locus VI example under the Control and Simulatio...View the full answer



