

Consider the robot arm depicted in Fig. P1.5-4. (a) Suppose that the units of (e_{a}(t)) are volts,
Question:
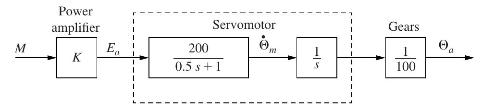
Consider the robot arm depicted in Fig. P1.5-4.
(a) Suppose that the units of \(e_{a}(t)\) are volts, that the units of both \(\theta_{m}(t)\) and \(\theta_{a}(t)\) are degrees, and that the units of time are seconds. If the servomotor is rated at \(24 \mathrm{~V}\) [the voltage \(e_{a}(t)\) should be less than or equal to \(24 \mathrm{~V}\) ], find the rated rpm of the motor (the motor rpm, in steady state, with \(24 \mathrm{~V}\) applied).
(b) Find the maximum rate of movement of the robot arm, in degrees per second, with a step voltage of \(e_{a}(t)=24 u(t)\) volts applied.
(c) Assume that \(e_{a}(t)\) is a step function of \(24 \mathrm{~V}\). Give the time required for the arm to be moving at 99 percent of the maximum rate of movement found in part (b).
(d) Suppose that the input \(m(t)\) is constrained by system hardware to be less than or equal to \(10 \mathrm{~V}\) in magnitude. What value would you choose for the gain \(K\). Why?
Fig. P1.5-4.
Step by Step Answer:


Digital Control System Analysis And Design
ISBN: 9781292061221
4th Global Edition
Authors: Charles Phillips, H. Nagle, Aranya Chakrabortty
