

Position vectors along the robotic arm from O to B and B to A arc r 0B
Question:
Position vectors along the robotic arm from O to B and B to A arc r0B = (100i +300j + 400k} mm and nBA = {350i + 225j - 640k) mm, respectively. Determine the distance from O to the grip at A.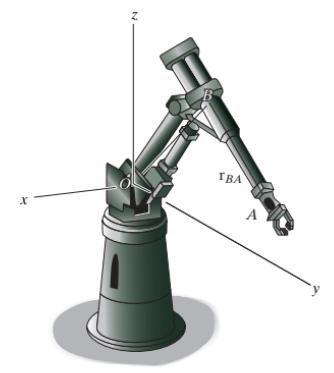
Fantastic news! We've Found the answer you've been seeking!
Step by Step Answer:
r OA r OB r B...View the full answer

Answered By
Deborah Joseph
My experience has a tutor has helped me with learning and relearning. You learn everyday actually and there are changes that are made to the curriculum every time so being a tutor has helped in keeping me updated about the present curriculum and all.
I have also been able to help over 100 students achieve better grades particularly in the categories of Math and Biology both in their internal examinations and external examinations.
2+ Reviews
10+ Question Solved
Related Book For 
Question Posted:
