

Derive the differential equation of the two degree-of-freedom model of the machine tool of Chapter Problem 6.8
Question:
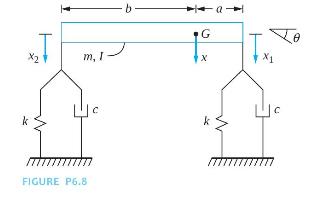
Derive the differential equation of the two degree-of-freedom model of the machine tool of Chapter Problem 6.8 using \(x\) and \(\theta\) as generalized coordinates.
Data From Chapter Problem 6..8:
A two degree-of-freedom model of a machine tool is illustrated in Figure P6.8. Using \(x_{1}\) and \(x_{2}\) as generalized coordinates, derive the differential equations governing the motion of the system.
Fantastic news! We've Found the answer you've been seeking!
Step by Step Answer:

Answered By
Sagar Kumar
I am Mechanical Engineer with CGPA of 3.98 out of 4.00 from Pakistan. I went to Government Boys Degree College, Sehwan for high school studies.
I appeared in NUST Entrance Exam for admission in university and ranked #516. My mathematics are excellent and I have participated in many math competitions and also won many of them. Recently, I participated in International Youth Math Challenge and was awarded with Gold Honor. Now, I am also an ambassador at International Youth Math Challenge,
I have been teaching when I was in 9th class class year 2012. I have taught students from 6th class to university level.
1+ Reviews
10+ Question Solved
Related Book For 
Question Posted:
