

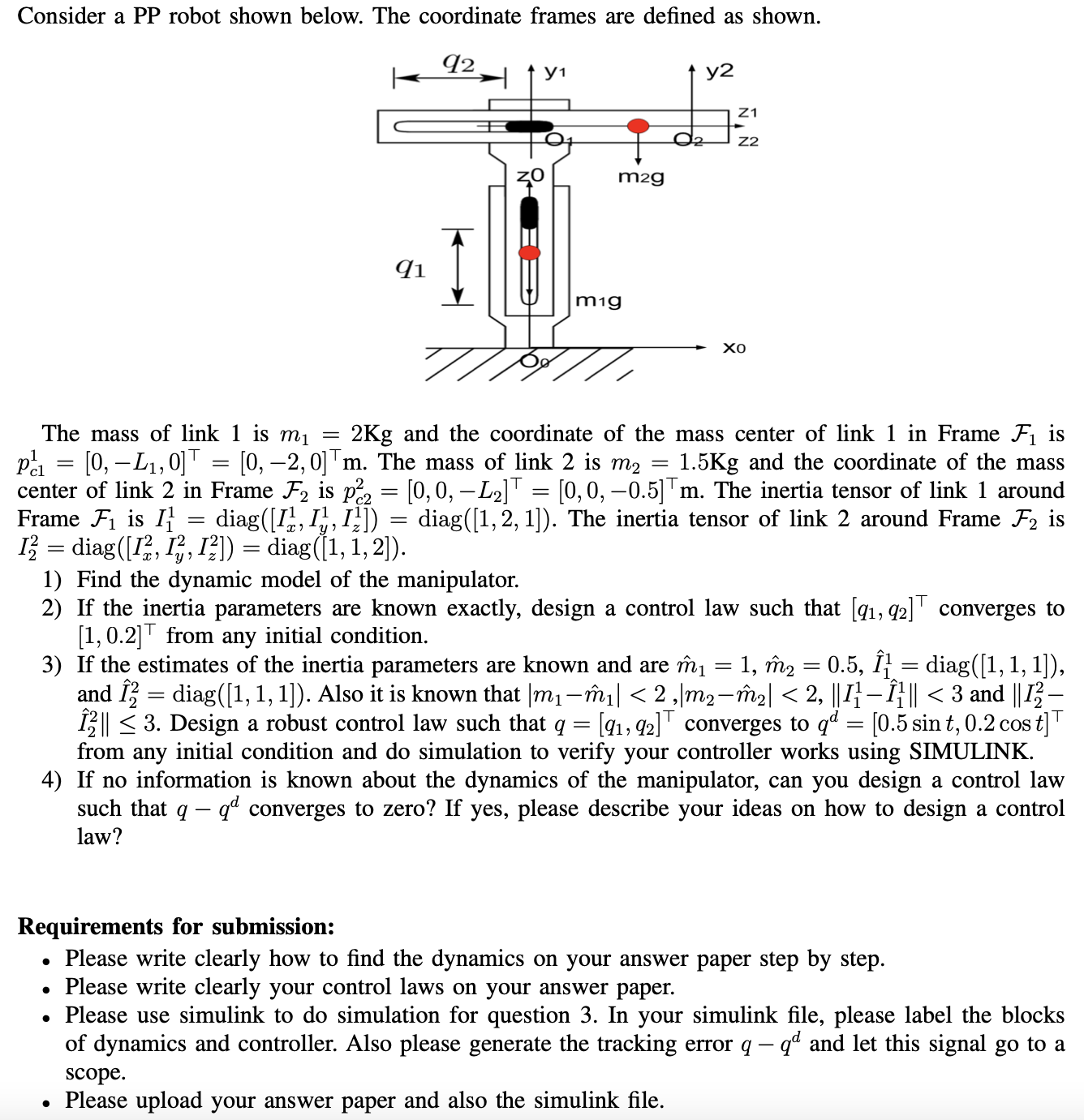
Consider a PP robot shown below. The coordinate frames are defined as shown. 92 91 y1...
Fantastic news! We've Found the answer you've been seeking!
Question:
Expert Answer:

Related Book For 
Applied Regression Analysis and Other Multivariable Methods
ISBN: 978-1285051086
5th edition
Authors: David G. Kleinbaum, Lawrence L. Kupper, Azhar Nizam, Eli S. Rosenberg
Posted Date:
