

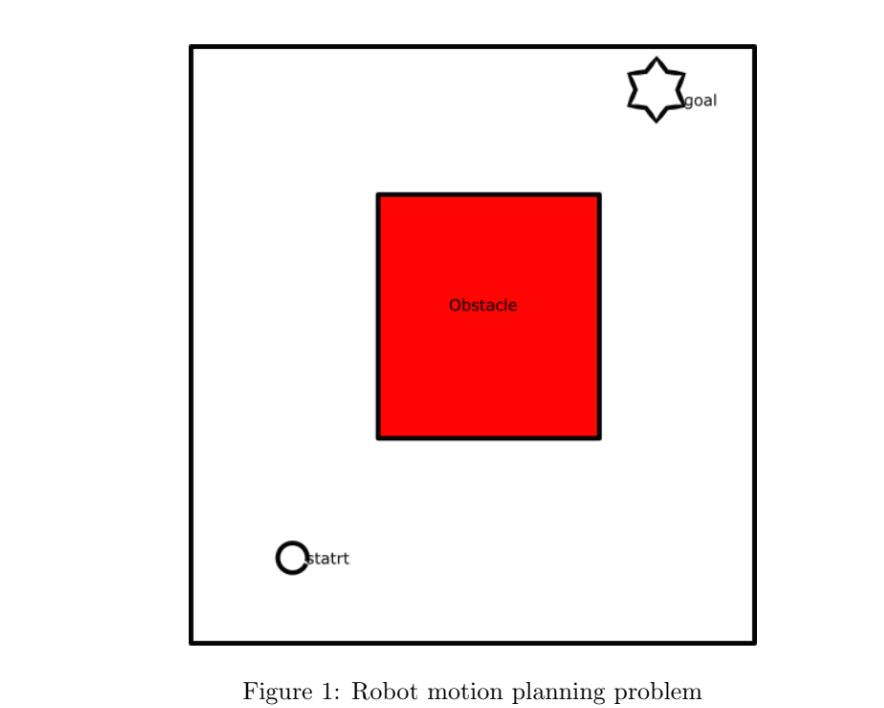
Consider Figure 1 where the robot needs to go from start location to goal.However, the environment has
Fantastic news! We've Found the answer you've been seeking!
Question:
Consider Figure where the robot needs to go from start location to goal.However, the environment has the obstacle in the middle. The robot has to devise a route from start to goal. a Formulate the shortest path path problem
b Use PSO to solve the problem and give details of the PSOimplementation
Display the route
Expert Answer:

Related Book For 
Artificial Intelligence A Modern Approach
ISBN: 9780134610993
4th Edition
Authors: Stuart Russell, Peter Norvig
Posted Date:
