

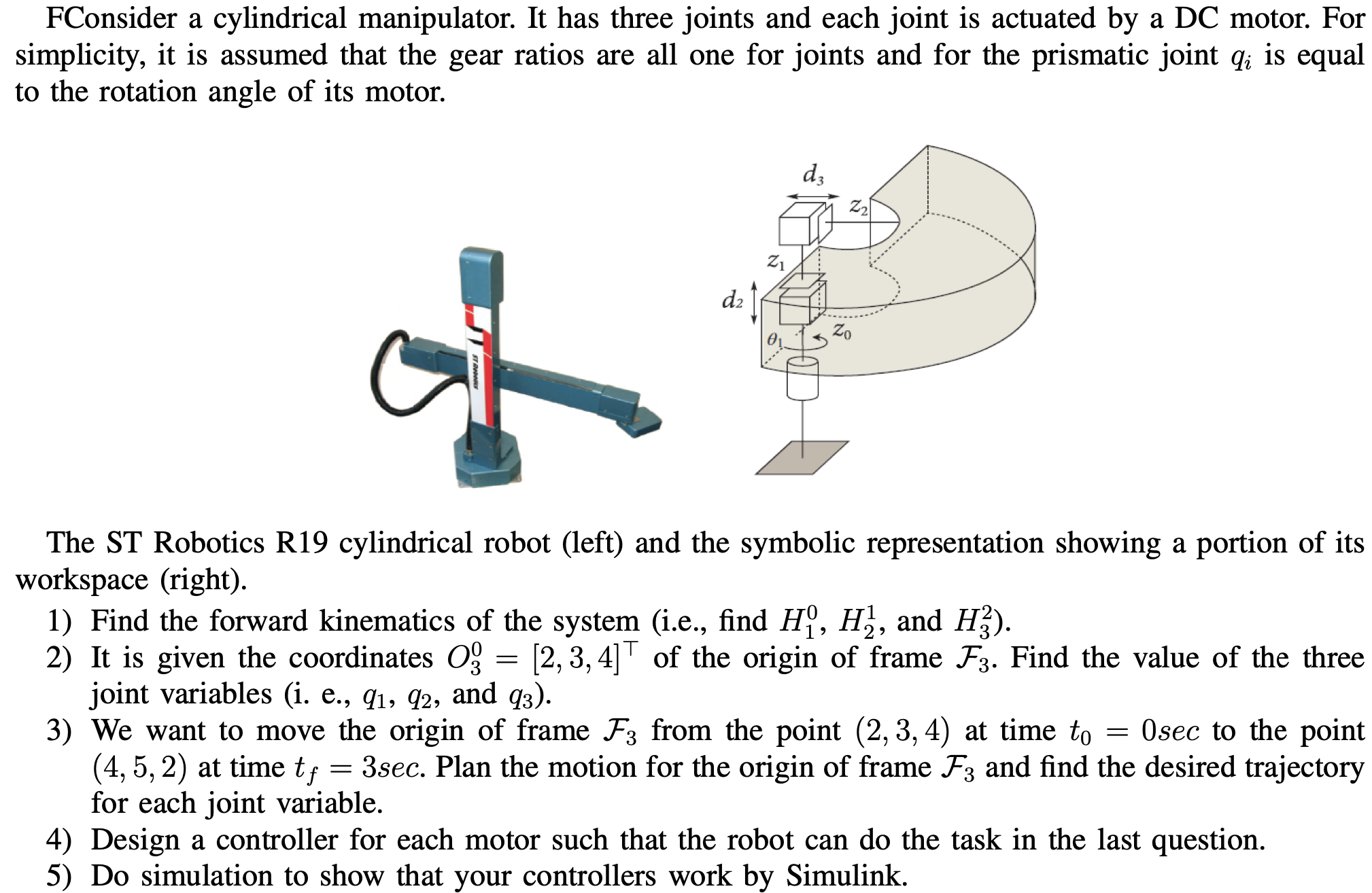
FConsider a cylindrical manipulator. It has three joints and each joint is actuated by a DC...
Fantastic news! We've Found the answer you've been seeking!
Question:
Expert Answer:

Related Book For 
Posted Date:
