

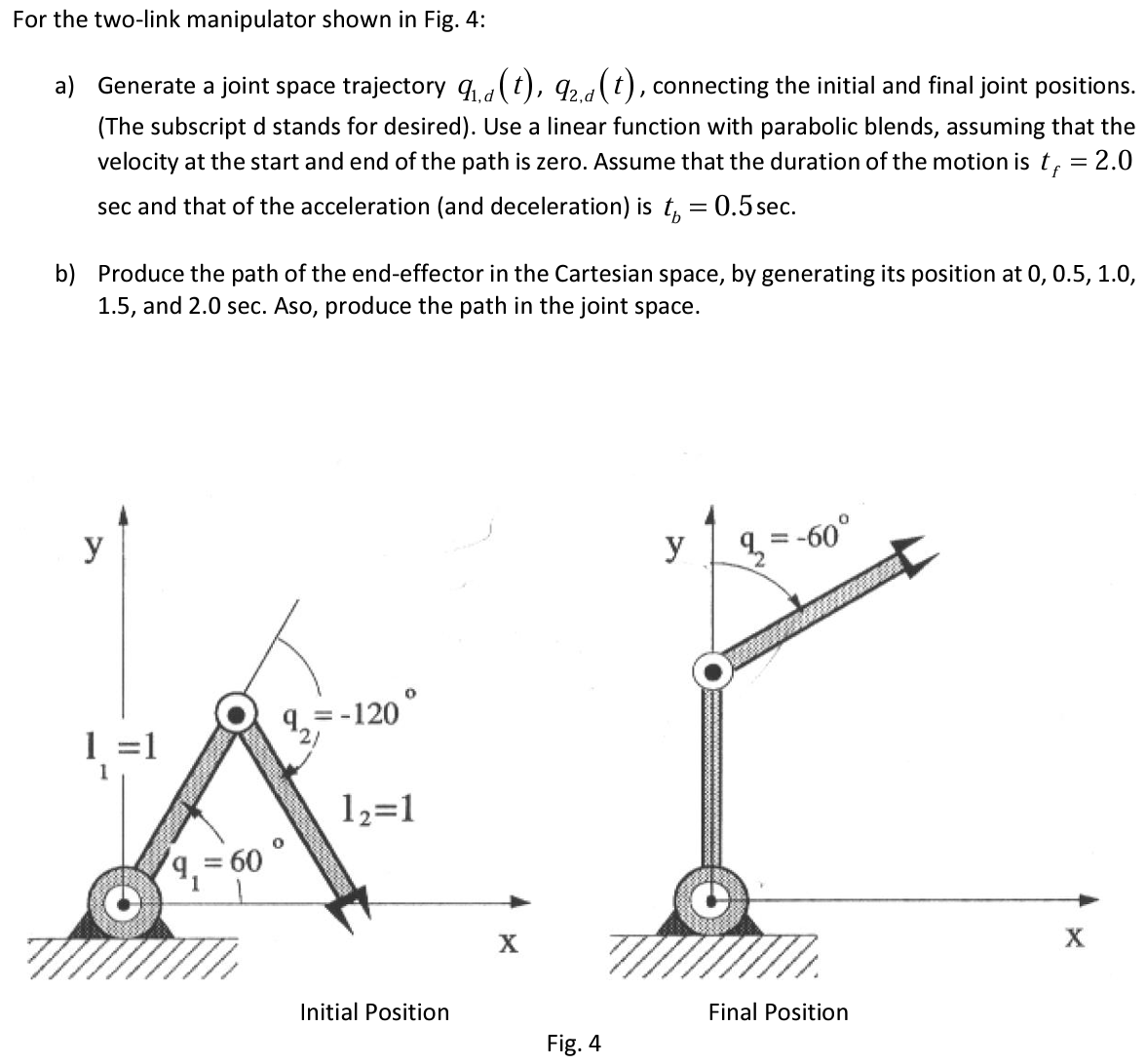
For the two-link manipulator shown in Fig. 4: a) Generate a joint space trajectory 9d (t),...
Fantastic news! We've Found the answer you've been seeking!
Question:
Expert Answer:

Related Book For 
Posted Date:
