

Frame Transformations 6. A robotic workcell with two robot manipulators and a camera is set up...
Fantastic news! We've Found the answer you've been seeking!
Question:
Transcribed Image Text:
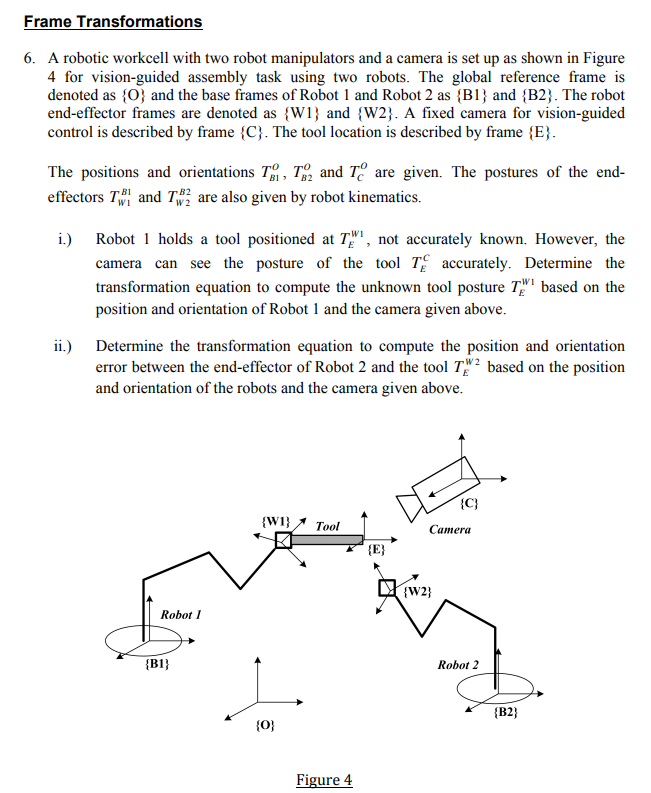
Frame Transformations 6. A robotic workcell with two robot manipulators and a camera is set up as shown in Figure 4 for vision-guided assembly task using two robots. The global reference frame is denoted as {O} and the base frames of Robot 1 and Robot 2 as {B1} and {B2}. The robot end-effector frames are denoted as {W1} and {W2}. A fixed camera for vision-guided control is described by frame {C}. The tool location is described by frame {E}. The positions and orientations T1, T2 and To are given. The postures of the end- effectors T1 and T2 are also given by robot kinematics. i.) Robot 1 holds a tool positioned at T, not accurately known. However, the camera can see the posture of the tool To accurately. Determine the transformation equation to compute the unknown tool posture T based on the position and orientation of Robot 1 and the camera given above. ii.) Determine the transformation equation to compute the position and orientation error between the end-effector of Robot 2 and the tool T2 based on the position and orientation of the robots and the camera given above. Robot 1 {B1} {W1} Tool {0} Figure 4 {C} Camera {E} {W2} Robot 2 {B2} Frame Transformations 6. A robotic workcell with two robot manipulators and a camera is set up as shown in Figure 4 for vision-guided assembly task using two robots. The global reference frame is denoted as {O} and the base frames of Robot 1 and Robot 2 as {B1} and {B2}. The robot end-effector frames are denoted as {W1} and {W2}. A fixed camera for vision-guided control is described by frame {C}. The tool location is described by frame {E}. The positions and orientations T1, T2 and To are given. The postures of the end- effectors T1 and T2 are also given by robot kinematics. i.) Robot 1 holds a tool positioned at T, not accurately known. However, the camera can see the posture of the tool To accurately. Determine the transformation equation to compute the unknown tool posture T based on the position and orientation of Robot 1 and the camera given above. ii.) Determine the transformation equation to compute the position and orientation error between the end-effector of Robot 2 and the tool T2 based on the position and orientation of the robots and the camera given above. Robot 1 {B1} {W1} Tool {0} Figure 4 {C} Camera {E} {W2} Robot 2 {B2}
Expert Answer:

Posted Date:
Students also viewed these mechanical engineering questions
-
Bell Company purchased goods from Powell with the following terms and details. Sales price, $14,000 Terms, (3/10, n/30) Date of sale, July 8 Date of payment, July 16 Shipping, FOB Shipping Point,...
-
Read and answer the question below. EMBRACE DEMOGRAPHICS AND SOCIETAL CHANGES Using Differences to Drive Value Force 7: Demographics and Societal Changes. One of the most important forces that is...
-
Grandma owns a large amount stock in the public company you are an accountant for; this is her life savings. You prepare financial statements as part of your job. Today you discover that your company...
-
A magnet of mass 5 . 0 1 kg is suspended from the ceiling by a cord as shown. A large magnet is somewhere off to the right, pulling on the small hanging magnet with a constant force of F = 8 0 . 4 N...
-
Microsoft is the worlds largest software company. For each of the following value-chain functions, discuss briefly what Microsoft managers would do to achieve that function and how important it is to...
-
Chadwick Enterprises, Incorporated, operates several restaurants throughout the Midwest. Three of its restaurants located in the center of a large urban area have experienced declining profits due to...
-
Marie Janes encounters the following situations in doing the audit of a large auto dealership. Janes is not a partner. 1.The sales manager tells her that there is a sale on new cars (at a substantial...
-
As part of the budgeting process, Northview Corporations CFO is developing the overhead budget for next year for its Evans Division. The division estimates that it will manufacture 150,000 units...
-
On January 1, 2020, Baltimore Company issued $250,000 face value, 7%, 10-year bonds at 102. Interest is paid annually on January 1. Baltimore uses the straight-line method for amortization. Use t...
-
Your cousin just started a new job at the local car wash station this week she told you that she enrolled in direct deposit but that her employer doesn't expect it to kick in until next month and...
-
The diameter of Jupiter is 1.40 105 km and the minimum distance between Earth and Jupiter is 5.88 108 km. Suppose we observe Jupiter at this distance using a telescope which produces an image via a...
-
In the snippet of RISC-V assembler code below, how many times is instruction memory accessed? How many times is data memory accessed? (Count only accesses to memory, not registers.) ld x9, 0(x10)...
-
Complete the coding create a string variables called location and set it equal to a place of your choice. Check to see if location.contains ("a"). Does location contain the letter a ? create a...
-
You are wanting to buy a 12 acre site for development of some townhome lots. The quoted price for the land is $2.50 per square foot (p.s.f.). What is the purchase price?
-
II. Are the factors of detrimental reliance against a government agency as presented in Gold Finger's Casino, Inc. v. State Department of Taxes,123 State 2d 456 (2000) present in Doyle v. State? In...
-
If demand is inelastic then a 1% increase in price leads to a fall in demanded quantity of 1%. then a 1% increase in price leads to a fall in quantity demanded of greater than 1%. then a 1% increase...
-
What is a manufacturing system?
-
Find a Fourier series representation of the Dirac delta function, \(\delta(x)\), on \([-L, L]\).
-
Use the result from Problem 6 plus properties of the Fourier transform to find the Fourier transform, of \(f(x)=x^{2} e^{-a|x|}\) for \(a>0\). Data from Problem 6 For \(a>0\), find the Fourier...
-
A damped harmonic oscillator is given by \[f(t)=\left\{\begin{array}{cc} A e^{-\alpha t} e^{i \omega_{0} t}, & t \geq 0 \\ 0, & t <0 \end{array} ight.\] a. Find \(\hat{f}(\omega)\) and b. the...

Study smarter with the SolutionInn App