

Problem 4 (23 points). Motorized cart. Consider a pendulum of mass m and length 1 on...
Fantastic news! We've Found the answer you've been seeking!
Question:
Transcribed Image Text:
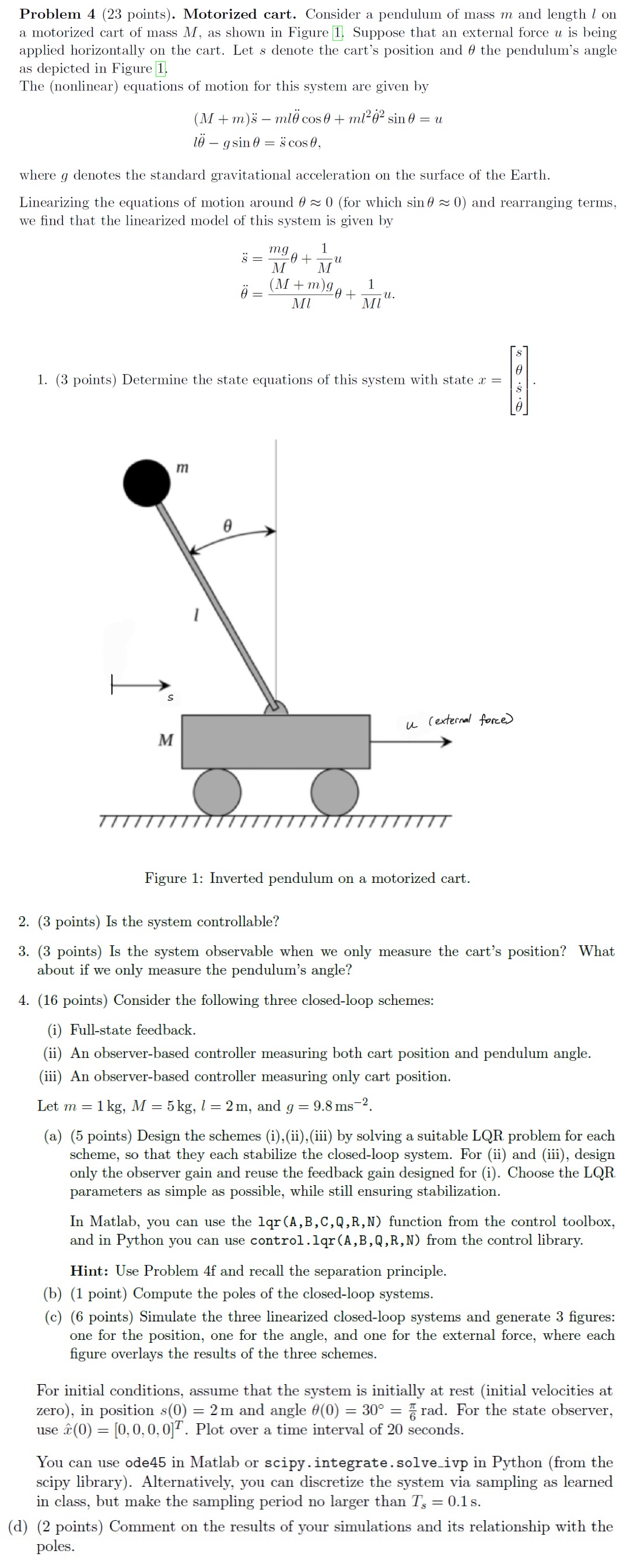
Problem 4 (23 points). Motorized cart. Consider a pendulum of mass m and length 1 on a motorized cart of mass M, as shown in Figure Suppose that an external force u is being applied horizontally on the cart. Let s denote the cart's position and the pendulum's angle as depicted in Figure 1. The (nonlinear) equations of motion for this system are given by where g denotes the standard gravitational acceleration on the surface of the Earth. Linearizing the equations of motion around 0 (for which sin 0) and rearranging terms, we find that the linearized model of this system is given by S (M +m)s - mle cos 0 + m 6 sin 0 = u 10 g sin = = $ cos 0, M m mg 1 -0 + U M M = (M + m)gg + MU S = 1. (3 points) Determine the state equations of this system with state x = 1 MU U. (external force) Figure 1: Inverted pendulum on a motorized cart. 2. (3 points) Is the system controllable? 3. (3 points) Is the system observable when we only measure the cart's position? What about if we only measure the pendulum's angle? 4. (16 points) Consider the following three closed-loop schemes: (i) Full-state feedback. (ii) An observer-based controller measuring both cart position and pendulum angle. (iii) An observer-based controller measuring only cart position. Let m= 1kg, M = 5 kg, l = 2m, and g = 9.8 ms-2. (a) (5 points) Design the schemes (i), (ii), (iii) by solving a suitable LQR problem for each scheme, so that they each stabilize the closed-loop system. For (ii) and (iii), design only the observer gain and reuse the feedback gain designed for (i). Choose the LQR parameters as simple as possible, while still ensuring stabilization. In Matlab, you can use the lqr (A,B,C,Q,R, N) function from the control toolbox, and in Python you can use control. lqr(A, B,Q,R,N) from the control library. Hint: Use Problem 4f and recall the separation principle. (b) (1 point) Compute the poles of the closed-loop systems. (c) (6 points) Simulate the three linearized closed-loop systems and generate 3 figures: one for the position, one for the angle, and one for the external force, where each figure overlays the results of the three schemes. For initial conditions, assume that the system is initially at rest (initial velocities at zero), in position s(0) = 2m and angle 0(0) = 30 rad. For the state observer, use (0) = [0, 0, 0, 0]T. Plot over a time interval of 20 seconds. You can use ode45 in Matlab or scipy.integrate. solve_ivp in Python (from the scipy library). Alternatively, you can discretize the system via sampling as learned in class, but make the sampling period no larger than T, = 0.1 s. (d) (2 points) Comment on the results of your simulations and its relationship with the poles. Problem 4 (23 points). Motorized cart. Consider a pendulum of mass m and length 1 on a motorized cart of mass M, as shown in Figure Suppose that an external force u is being applied horizontally on the cart. Let s denote the cart's position and the pendulum's angle as depicted in Figure 1. The (nonlinear) equations of motion for this system are given by where g denotes the standard gravitational acceleration on the surface of the Earth. Linearizing the equations of motion around 0 (for which sin 0) and rearranging terms, we find that the linearized model of this system is given by S (M +m)s - mle cos 0 + m 6 sin 0 = u 10 g sin = = $ cos 0, M m mg 1 -0 + U M M = (M + m)gg + MU S = 1. (3 points) Determine the state equations of this system with state x = 1 MU U. (external force) Figure 1: Inverted pendulum on a motorized cart. 2. (3 points) Is the system controllable? 3. (3 points) Is the system observable when we only measure the cart's position? What about if we only measure the pendulum's angle? 4. (16 points) Consider the following three closed-loop schemes: (i) Full-state feedback. (ii) An observer-based controller measuring both cart position and pendulum angle. (iii) An observer-based controller measuring only cart position. Let m= 1kg, M = 5 kg, l = 2m, and g = 9.8 ms-2. (a) (5 points) Design the schemes (i), (ii), (iii) by solving a suitable LQR problem for each scheme, so that they each stabilize the closed-loop system. For (ii) and (iii), design only the observer gain and reuse the feedback gain designed for (i). Choose the LQR parameters as simple as possible, while still ensuring stabilization. In Matlab, you can use the lqr (A,B,C,Q,R, N) function from the control toolbox, and in Python you can use control. lqr(A, B,Q,R,N) from the control library. Hint: Use Problem 4f and recall the separation principle. (b) (1 point) Compute the poles of the closed-loop systems. (c) (6 points) Simulate the three linearized closed-loop systems and generate 3 figures: one for the position, one for the angle, and one for the external force, where each figure overlays the results of the three schemes. For initial conditions, assume that the system is initially at rest (initial velocities at zero), in position s(0) = 2m and angle 0(0) = 30 rad. For the state observer, use (0) = [0, 0, 0, 0]T. Plot over a time interval of 20 seconds. You can use ode45 in Matlab or scipy.integrate. solve_ivp in Python (from the scipy library). Alternatively, you can discretize the system via sampling as learned in class, but make the sampling period no larger than T, = 0.1 s. (d) (2 points) Comment on the results of your simulations and its relationship with the poles.
Expert Answer:

Related Book For 

Posted Date:
Students also viewed these mechanical engineering questions
-
other wind instruments. Its current value of operations, which is also its value of debt plus equity, is estimated to be $200 million. Higgs has $110 million face value, zero coupon debt that is due...
-
s1 educated (SSE) student for every three public school educated (PSE) students. Reasoning that students are not very dissimilar from threads, he suggests the following entry and exit routines be...
-
In any high-precision Foucault pendulum, it is important that the pendular restoring force be isotropic, since anisotropy will make the swinging period different in different planes and thereby cause...
-
What is food processing ? Different types of food processing methods Briefly explained
-
Explain the accounting principles of each of the following: (a) Going concern; (b) Accruals; (c) Consistency; (d) The concept of prudence?
-
Determine the reactions at the beam supports for the given loading. 900 N/m 400 N/m 1.5 m 0.4 m 0.6 m
-
Data as of 12/31/15 for Dry Hole Oil Companys U.S. properties are as follows: (This problem is similar to problem 14 in chapter 6.) Dry Holes activities during 2016 were as follows: a. Use T-accounts...
-
A cooling coil consists of a bank of aluminum (k = 237 W/m K) finned tubes having the core configuration of figure and an inner diameter of 13.8 mm. The tubes are installed in a plenum whose square...
-
Smoke detectors: An insurance company offers a discount to homeowners who install smoke detector's in their homes. A company representative claims that 80% or more of the policy holders have smoke...
-
On December 31, 2021, the end of its first year of operations, Botani Associates owned the following securities that are held as long-term investments. On this date, the total fair value of the...
-
Pina Colada, Inc., has made a name for itself in the exquisitely fragrant candle market. It incurred a variety of costs over the past year as part of its manufacturing, selling, and administrative...
-
True or False. The transfer functions of several different systems can be same.
-
Fill in the Blank. When the frequency of excitation coincides with the natural frequency of the system, the condition is known as ___________ .
-
True or False. In a system with rotational unbalance, the effect of damping becomes negligibly small at higher speeds.
-
True or False. The steady-state solution can be assumed to be harmonic for small values of dry-friction force.
-
True or False. The unbalance in a rotating machine causes vibration.
-
Nstruction. Write Your Complete Design Of The Given Situation. Design A Three-Position Controller For The Temperature Of A Drying Oven Shown In The Given Figure Below. The Specifications Are: For T ?...
-
l ask this second time correnct answer is 38,01 can we look pls Consider a non-conducting rod of length 8.8 m having a uniform charge density 4.5 nC/m. Find the electric potential at P, a...
-
Consider a unity feedback system with the loop transfer function (a) For K = 4, show that the gain margin is 3.5 dB. (b) If we wish to achieve a gain margin equal to 16 dB, determine the value of the...
-
Consider the closed-loop transfer function Develop an m-file to, obtain the Bode plot and verify that the resonant frequency is 5 rad/s and that the peak magnitude M pÏ is 14 dB. 25 r(s) = s, s...
-
A fighter aircraft has the transfer function Where is the pitch rate (rad/s) and 5 is the elevator deflection (rad). The four poles represent the phugoid and short-period modes. The phugoid mode has...
-
Brandon Company produces and sells a product that has variable costs of $9 per unit and fixed costs of $110,000 per year. 1. Compute the unit cost at a production and sales level of 10,000 units per...
-
Evaluating performance, decision by decision, is costly. Aggregate measures, like the income statement, are frequently used. How might the wide use of income statements affect managers decisions...
-
An administrator at Riverview Hospital is considering how to use some space made available when the outpatient clinic moved to a new building. She has narrowed her choices as follows: a. Use the...

Study smarter with the SolutionInn App