

The purpose of this assignment is to use the concept of rigid body dynamics and Lagrangian...
Fantastic news! We've Found the answer you've been seeking!
Question:

Transcribed Image Text:
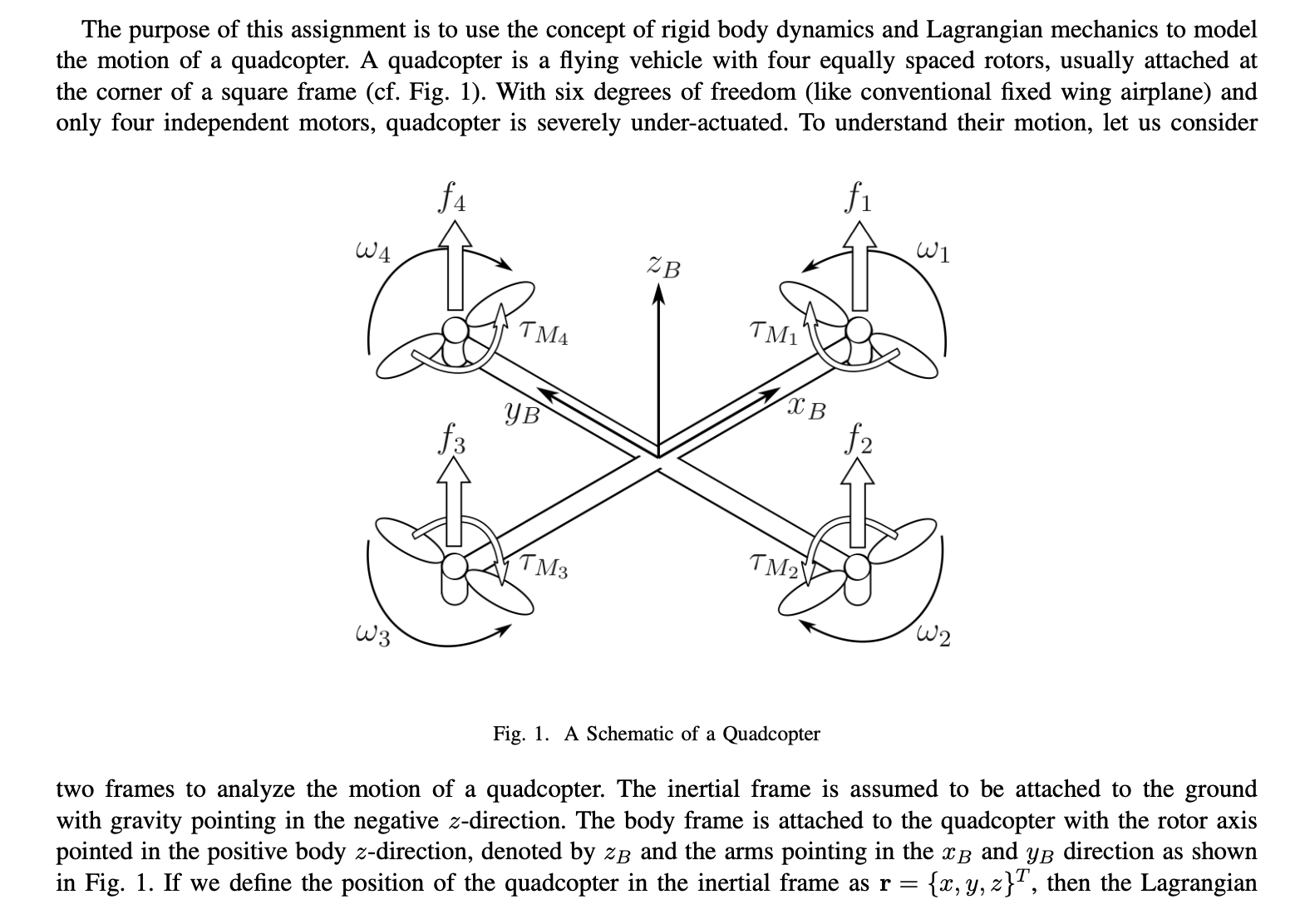
The purpose of this assignment is to use the concept of rigid body dynamics and Lagrangian mechanics to model the motion of a quadcopter. A quadcopter is a flying vehicle with four equally spaced rotors, usually attached at the corner of a square frame (cf. Fig. 1). With six degrees of freedom (like conventional fixed wing airplane) and only four independent motors, quadcopter is severely under-actuated. To understand their motion, let us consider WA f4 ZB f1 W1 W3 3 TM4 YB TM1 XB f2 TM2 TM3 W2 Fig. 1. A Schematic of a Quadcopter two frames to analyze the motion of a quadcopter. The inertial frame is assumed to be attached to the ground with gravity pointing in the negative z-direction. The body frame is attached to the quadcopter with the rotor axis pointed in the positive body z-direction, denoted by zB and the arms pointing in the x and y direction as shown in Fig. 1. If we define the position of the quadcopter in the inertial frame as r = {x, y, z}, then the Lagrangian formulation can be used to derive the following translational and rotational equations of motion: 0 r = -9 1 + cos sin cos + sin & sin T sin sin cos - cos sin o m cos cos r }=^{ 1 0 - sin A A = 0 cos cos sin 0 - sin cos 0 cos Iw = wx (Iw) +T (1) (2) where (), 0, 0) denote the 3 - 2 - 1 Euler angle sequence and w = (p,q,r)T denotes the body angular rates of the quadcopter. Notice that the moment of inertia matrix, I, is a diagonal matrix due to the symmetric geometric shape of the quadcopter. T is the combined forces of rotors in the direction of body z-axis, i.e., zB: 4 4 T = = i=1 i=1 (4) T consists of roll, pitch and yaw moments. Notice that the roll moment is generated by decreasing the second rotor angular velocity and increasing the fourth rotor angular velocity. Similarly, the pitch moment is generated by decreasing the first rotor angular velocity and increasing the third rotor angular velocity. The yaw moment is generated by increasing the angular velocities of two opposite rotors and decreasing the angular velocities of the other two rotors. L M T = { N kl(-N+N) kl(-N+N) b(NNNN) where, is the distance between the rotor and center of mass of the quadcopter. You are required to complete following tasks to get more insights into quadcopter motion: 1) Let us consider the following value of parameters to simulate the quadcopter motion in MATLAB while using the in-built command ODE45 to solve the quadcopter equations of motion: g = 9.81m/s, m = 0.450kg, 1 = 0.225m, k = 2.98 107, b = 1.14 10-6 Ixx = Iyy = 4.85 10 kg m, Izz = 8.80 10- kg m - - 2 (6) (7) The initial conditions corresponds to the quadcopter being at rest at the inertial frame origin with body frame aligned with the inertial frame, i.e. r(0) = {0,0,0}, (0) = {0,0,0}, &(0) = 0(0) = (0) = 0, p(0) = q(0) = r(0) = 0 The control input, i.e., angular velocities of the four rotor are computed as follows: a) For first one second, the quadcopter is ascended by increasing all of the rotor velocities from the hover thrust. Then, the ascend is stopped by decreasing the rotor velocities for the following one second. Ni Ninover 70 sin(2t/4), t <1, i = 1,2,3,4 Ni Ninover 77 sin(2t/4), 1 t2 = (9) The over is equal for all four rotors and corresponds to thrust produced being to the weight of the quadcopter, i.e. 4 T =T; T=>T = 4kn nover = mg i=1 The quadcopter should be hovering at an altitude after this thrust profile. The purpose of this assignment is to use the concept of rigid body dynamics and Lagrangian mechanics to model the motion of a quadcopter. A quadcopter is a flying vehicle with four equally spaced rotors, usually attached at the corner of a square frame (cf. Fig. 1). With six degrees of freedom (like conventional fixed wing airplane) and only four independent motors, quadcopter is severely under-actuated. To understand their motion, let us consider WA f4 ZB f1 W1 W3 3 TM4 YB TM1 XB f2 TM2 TM3 W2 Fig. 1. A Schematic of a Quadcopter two frames to analyze the motion of a quadcopter. The inertial frame is assumed to be attached to the ground with gravity pointing in the negative z-direction. The body frame is attached to the quadcopter with the rotor axis pointed in the positive body z-direction, denoted by zB and the arms pointing in the x and y direction as shown in Fig. 1. If we define the position of the quadcopter in the inertial frame as r = {x, y, z}, then the Lagrangian formulation can be used to derive the following translational and rotational equations of motion: 0 r = -9 1 + cos sin cos + sin & sin T sin sin cos - cos sin o m cos cos r }=^{ 1 0 - sin A A = 0 cos cos sin 0 - sin cos 0 cos Iw = wx (Iw) +T (1) (2) where (), 0, 0) denote the 3 - 2 - 1 Euler angle sequence and w = (p,q,r)T denotes the body angular rates of the quadcopter. Notice that the moment of inertia matrix, I, is a diagonal matrix due to the symmetric geometric shape of the quadcopter. T is the combined forces of rotors in the direction of body z-axis, i.e., zB: 4 4 T = = i=1 i=1 (4) T consists of roll, pitch and yaw moments. Notice that the roll moment is generated by decreasing the second rotor angular velocity and increasing the fourth rotor angular velocity. Similarly, the pitch moment is generated by decreasing the first rotor angular velocity and increasing the third rotor angular velocity. The yaw moment is generated by increasing the angular velocities of two opposite rotors and decreasing the angular velocities of the other two rotors. L M T = { N kl(-N+N) kl(-N+N) b(NNNN) where, is the distance between the rotor and center of mass of the quadcopter. You are required to complete following tasks to get more insights into quadcopter motion: 1) Let us consider the following value of parameters to simulate the quadcopter motion in MATLAB while using the in-built command ODE45 to solve the quadcopter equations of motion: g = 9.81m/s, m = 0.450kg, 1 = 0.225m, k = 2.98 107, b = 1.14 10-6 Ixx = Iyy = 4.85 10 kg m, Izz = 8.80 10- kg m - - 2 (6) (7) The initial conditions corresponds to the quadcopter being at rest at the inertial frame origin with body frame aligned with the inertial frame, i.e. r(0) = {0,0,0}, (0) = {0,0,0}, &(0) = 0(0) = (0) = 0, p(0) = q(0) = r(0) = 0 The control input, i.e., angular velocities of the four rotor are computed as follows: a) For first one second, the quadcopter is ascended by increasing all of the rotor velocities from the hover thrust. Then, the ascend is stopped by decreasing the rotor velocities for the following one second. Ni Ninover 70 sin(2t/4), t <1, i = 1,2,3,4 Ni Ninover 77 sin(2t/4), 1 t2 = (9) The over is equal for all four rotors and corresponds to thrust produced being to the weight of the quadcopter, i.e. 4 T =T; T=>T = 4kn nover = mg i=1 The quadcopter should be hovering at an altitude after this thrust profile.
Expert Answer:

Related Book For 
Concepts In Federal Taxation
ISBN: 9780324379556
19th Edition
Authors: Kevin E. Murphy, Mark Higgins, Tonya K. Flesher
Posted Date:
Students also viewed these mechanical engineering questions
-
What technological change did Oprah Winfrey introduce into her programming in the 2 1 st century that would not have been possible when she first went on television? What audience was she targeting...
-
What is the critical leadership problem facing the 2nd ABCT and how will you use the processes and concepts from L100 to improve the ABCT and achieve your vision? Clearly and comprehensively explain,...
-
Case Analysis Critical thinking, creativity, and problem-solving are among some of the top skills needed by employers in the supply chain industry. This assignment will stretch your critical...
-
Let S be the portion of the cylinder y = e x in the first octant that projects parallel to the x-axis onto the rectangle R yz : 1 y 2, 0 z 1 in the yz-plane. Let n be the unit vector normal to S...
-
In the Sales Transactions database, use Excels filtering capability to extract all orders that used PayPal, all orders under $ 100, and all orders that were over $ 100 and used a credit card.
-
Distinguish among a ferromagnetic substance, an antiferromagnetic substance, and a ferrimagnetic substance.
-
Ellen Landis does not understand why the overhead volume variance indicates that fixed overhead costs are under- or overapplied. Clarify this matter for Ellen.
-
If the planes of a crystal are 3.50 A (1 A = 10-10 m = 1 Angstrom unit) apart, (a) What wavelength of electromagnetic waves is needed so that the first strong interference maximum in the Bragg...
-
Required information Skip to question Below is the year-end adjusted trial balance for Lucie Accounting. Lucie Accounting Trial Balance For Year Ended December 31, 2023 Account Debit Credit Cash...
-
S&P 500 Index is at 2780. A European June 21, 2019 SPX call option struck at 2500 is trading at $316.94. An identical put is trading at $55.15. A T-bill with 200 days to maturity is quoted at a yield...
-
The CEO of Kiwibank, Steve Jurkovich, doesnt appear to be radical. The father has been at the helm for over four years and has spent much of his corporate life in banking. But things have been...
-
Consider the system of Fig. P8.2-2 with T = 1 T = 1 s. The plant frequency response Extra close brace or missing open brace is given in Table P8.4-1. (a) Let D ( z ) = 1 D ( z ) = 1 . If the system...
-
Two insulated tanks, \(A\) and \(B\), are connected by a valve. Tank \(A\) has a volume of \(0.70 \mathrm{~m}^{3}\) and contains steam at \(1.5 \mathrm{bar}, 200^{\circ} \mathrm{C}\). Tank \(B\) has...
-
An electric circuit consists of 7 transistors connected in parallel. Determine the reliability of each transistor if the overall reliability of the circuit is to be 0.99 .
-
Google has long been cited as a fun environment to work in. Worldwide it employs just over 100 000 people. 56 Under the parent company, Alphabet, it is part of a family of 25 other brands. Google...
-
PSYC 330 No. 2 Chpt. 2 Homework Collect the Data Record the number of pairs of shoes you own. 1. Randomly survey 30 classmates about the number of pairs of shoes they own. Record their values. 7 1- 8...
-
Assume Eq. 6-14 gives the drag force on a pilot plus ejection seat just after they are ejected from a plane traveling horizontally at 1300 km/h. Assume also that the mass of the seat is equal to the...
-
Does Russias BOP balance? Use the following balance of payments data for Russia (Russian Federation) from the IMF to answer this problem. Assumptions (million US$) 2000 2001 2002 2003 2004 2005 2006...
-
Is the Euro Area experiencing a net capital inflow? Use the following balance of payments data for the Euro Area from the IMF to answer this problem. Assumptions (billion US$) 2000 2001 2002 2003...
-
What is the Euro Areas total for Groups A and B? Use the following balance of payments data for the Euro Area from the IMF to answer this problem. Assumptions (billion US$) 2000 2001 2002 2003 2004...

Study smarter with the SolutionInn App