

Table 17.3 shows that the gains resulting from the tuning procedures of Chapter 17 turned out to
Question:
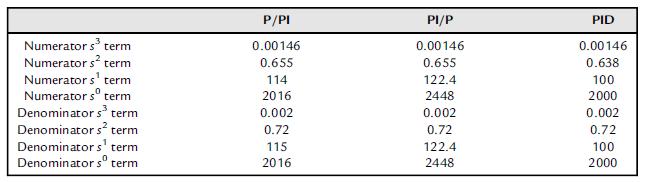
Table 17.3 shows that the gains resulting from the tuning procedures of Chapter 17 turned out to provide nearly equivalent transfer functions for P/PI, PI/P, and PID position control. This could also have been done analytically.
data from table 17.3
a. Using the relationships shown in Table 17.1, convert the three loop gains (KVP, KVI, and KPP) from P/PI compensation to make exact equivalence in the denominator of PI/P.
data from table 17.1
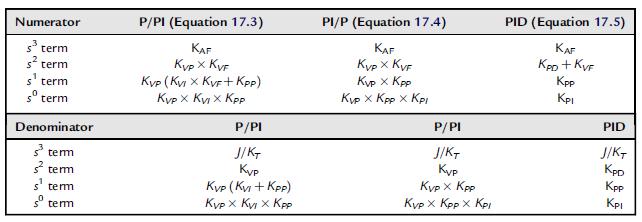
b. Repeat for PID control.
c. Convert the two feed-forward gains from P/PI compensation to make exact equivalence in two of the numerator terms of PI/P.
d. Repeat for PID control.
e. Compare the numerator terms. Which, if any, are different, and by how much?
Step by Step Answer:


Control System Design Guide Using Your Computer To Understand And Diagnose Feedback Controllers
ISBN: 9780123859204
4th Edition
Authors: George Ellis
