

Suppose that an agent is in a 3 x 3 maze environment like the one shown in
Question:
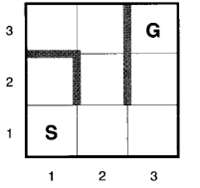
Suppose that an agent is in a 3 x 3 maze environment like the one shown in Figure. The agent knows that its initial location is (1, 1), that the goal is at (3, 3), and that the four actions Up, Down, Left, Right have their usual effects unless blocked by a wall. The agent does not know where the internal walls are. In any given state, the agent perceives the set of legal actions; it can also tell whether the state is one it has visited before or a new state.
a. Explain how this online search problem can be viewed as an offline search in belief state space, where the initial belief state includes all possible environment configurations. How large is the initial belief state? How large is the space of belief states?
b. How many distinct percepts are possible in the initial state?
c. Describe the first few branches of a contingency plan for this problem. How large (roughly) is the complete plan?
Notice that this contingency plan is a solution for every possible environment fitting the given description. Therefore, interleaving of search and execution is not strictly necessary even in unknownenvironments.
Step by Step Answer:
This question is slightly ambiguous as to what the percept is x either the percept is Just the location or it gives exactly the set of unblocked direc...View the full answer


Artificial Intelligence A Modern Approach
ISBN: 978-0137903955
2nd Edition
Authors: Stuart J. Russell and Peter Norvig
