

A ball is placed on a beam, see figure below, where it is allowed to roll...
Fantastic news! We've Found the answer you've been seeking!
Question:
Transcribed Image Text:
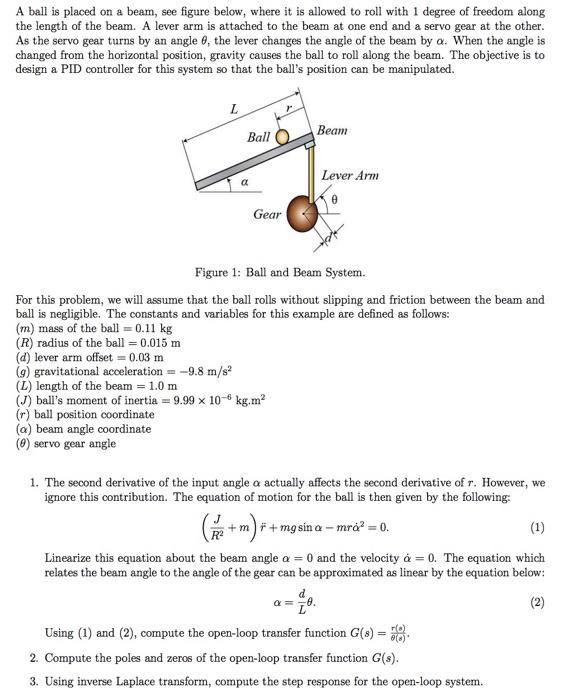
A ball is placed on a beam, see figure below, where it is allowed to roll with 1 degree of freedom along the length of the beam. A lever arm is attached to the beam at one end and a servo gear at the other. As the servo gear turns by an angle 0, the lever changes the angle of the beam by a. When the angle is changed from the horizontal position, gravity causes the ball to roll along the beam. The objective is to design a PID controller for this system so that the ball's position can be manipulated. Beam Ball Lever Arm a Gear Figure 1: Ball and Beam System. For this problem, we will assume that the ball rolls without slipping and friction between the beam and ball is negligible. The constants and variables for this example are defined as follows: (m) mass of the ball = 0.11 kg (R) radius of the ball = 0.015 m (d) lever arm offset = 0.03 m (9) gravitational acceleration = -9.8 m/s? (L) length of the beam = 1.0 m (J) ball's moment of inertia = 9.99 x 10-6 kg.m? (r) ball position coordinate (a) beam angle coordinate (0) servo gear angle 1. The second derivative of the input angle a actually affects the second derivative of r. However, we ignore this contribution. The equation of motion for the ball is then given by the following: +m)#+mgsin a - mrå? = 0. (1) Linearize this equation about the beam angle a = 0 and the velocity å = 0. The equation which relates the beam angle to the angle of the gear can be approximated as linear by the equation below: d. (2) Using (1) and (2), compute the open-loop transfer function G(s) =8. 2. Compute the poles and zeros of the open-loop transfer function G(s). 3. Using inverse Laplace transform, compute the step response for the open-loop system. A ball is placed on a beam, see figure below, where it is allowed to roll with 1 degree of freedom along the length of the beam. A lever arm is attached to the beam at one end and a servo gear at the other. As the servo gear turns by an angle 0, the lever changes the angle of the beam by a. When the angle is changed from the horizontal position, gravity causes the ball to roll along the beam. The objective is to design a PID controller for this system so that the ball's position can be manipulated. Beam Ball Lever Arm a Gear Figure 1: Ball and Beam System. For this problem, we will assume that the ball rolls without slipping and friction between the beam and ball is negligible. The constants and variables for this example are defined as follows: (m) mass of the ball = 0.11 kg (R) radius of the ball = 0.015 m (d) lever arm offset = 0.03 m (9) gravitational acceleration = -9.8 m/s? (L) length of the beam = 1.0 m (J) ball's moment of inertia = 9.99 x 10-6 kg.m? (r) ball position coordinate (a) beam angle coordinate (0) servo gear angle 1. The second derivative of the input angle a actually affects the second derivative of r. However, we ignore this contribution. The equation of motion for the ball is then given by the following: +m)#+mgsin a - mrå? = 0. (1) Linearize this equation about the beam angle a = 0 and the velocity å = 0. The equation which relates the beam angle to the angle of the gear can be approximated as linear by the equation below: d. (2) Using (1) and (2), compute the open-loop transfer function G(s) =8. 2. Compute the poles and zeros of the open-loop transfer function G(s). 3. Using inverse Laplace transform, compute the step response for the open-loop system. A ball is placed on a beam, see figure below, where it is allowed to roll with 1 degree of freedom along the length of the beam. A lever arm is attached to the beam at one end and a servo gear at the other. As the servo gear turns by an angle 0, the lever changes the angle of the beam by a. When the angle is changed from the horizontal position, gravity causes the ball to roll along the beam. The objective is to design a PID controller for this system so that the ball's position can be manipulated. Beam Ball Lever Arm a Gear Figure 1: Ball and Beam System. For this problem, we will assume that the ball rolls without slipping and friction between the beam and ball is negligible. The constants and variables for this example are defined as follows: (m) mass of the ball = 0.11 kg (R) radius of the ball = 0.015 m (d) lever arm offset = 0.03 m (9) gravitational acceleration = -9.8 m/s? (L) length of the beam = 1.0 m (J) ball's moment of inertia = 9.99 x 10-6 kg.m? (r) ball position coordinate (a) beam angle coordinate (0) servo gear angle 1. The second derivative of the input angle a actually affects the second derivative of r. However, we ignore this contribution. The equation of motion for the ball is then given by the following: +m)#+mgsin a - mrå? = 0. (1) Linearize this equation about the beam angle a = 0 and the velocity å = 0. The equation which relates the beam angle to the angle of the gear can be approximated as linear by the equation below: d. (2) Using (1) and (2), compute the open-loop transfer function G(s) =8. 2. Compute the poles and zeros of the open-loop transfer function G(s). 3. Using inverse Laplace transform, compute the step response for the open-loop system. A ball is placed on a beam, see figure below, where it is allowed to roll with 1 degree of freedom along the length of the beam. A lever arm is attached to the beam at one end and a servo gear at the other. As the servo gear turns by an angle 0, the lever changes the angle of the beam by a. When the angle is changed from the horizontal position, gravity causes the ball to roll along the beam. The objective is to design a PID controller for this system so that the ball's position can be manipulated. Beam Ball Lever Arm a Gear Figure 1: Ball and Beam System. For this problem, we will assume that the ball rolls without slipping and friction between the beam and ball is negligible. The constants and variables for this example are defined as follows: (m) mass of the ball = 0.11 kg (R) radius of the ball = 0.015 m (d) lever arm offset = 0.03 m (9) gravitational acceleration = -9.8 m/s? (L) length of the beam = 1.0 m (J) ball's moment of inertia = 9.99 x 10-6 kg.m? (r) ball position coordinate (a) beam angle coordinate (0) servo gear angle 1. The second derivative of the input angle a actually affects the second derivative of r. However, we ignore this contribution. The equation of motion for the ball is then given by the following: +m)#+mgsin a - mrå? = 0. (1) Linearize this equation about the beam angle a = 0 and the velocity å = 0. The equation which relates the beam angle to the angle of the gear can be approximated as linear by the equation below: d. (2) Using (1) and (2), compute the open-loop transfer function G(s) =8. 2. Compute the poles and zeros of the open-loop transfer function G(s). 3. Using inverse Laplace transform, compute the step response for the open-loop system. A ball is placed on a beam, see figure below, where it is allowed to roll with 1 degree of freedom along the length of the beam. A lever arm is attached to the beam at one end and a servo gear at the other. As the servo gear turns by an angle 0, the lever changes the angle of the beam by a. When the angle is changed from the horizontal position, gravity causes the ball to roll along the beam. The objective is to design a PID controller for this system so that the ball's position can be manipulated. Beam Ball Lever Arm a Gear Figure 1: Ball and Beam System. For this problem, we will assume that the ball rolls without slipping and friction between the beam and ball is negligible. The constants and variables for this example are defined as follows: (m) mass of the ball = 0.11 kg (R) radius of the ball = 0.015 m (d) lever arm offset = 0.03 m (9) gravitational acceleration = -9.8 m/s? (L) length of the beam = 1.0 m (J) ball's moment of inertia = 9.99 x 10-6 kg.m? (r) ball position coordinate (a) beam angle coordinate (0) servo gear angle 1. The second derivative of the input angle a actually affects the second derivative of r. However, we ignore this contribution. The equation of motion for the ball is then given by the following: +m)#+mgsin a - mrå? = 0. (1) Linearize this equation about the beam angle a = 0 and the velocity å = 0. The equation which relates the beam angle to the angle of the gear can be approximated as linear by the equation below: d. (2) Using (1) and (2), compute the open-loop transfer function G(s) =8. 2. Compute the poles and zeros of the open-loop transfer function G(s). 3. Using inverse Laplace transform, compute the step response for the open-loop system. A ball is placed on a beam, see figure below, where it is allowed to roll with 1 degree of freedom along the length of the beam. A lever arm is attached to the beam at one end and a servo gear at the other. As the servo gear turns by an angle 0, the lever changes the angle of the beam by a. When the angle is changed from the horizontal position, gravity causes the ball to roll along the beam. The objective is to design a PID controller for this system so that the ball's position can be manipulated. Beam Ball Lever Arm a Gear Figure 1: Ball and Beam System. For this problem, we will assume that the ball rolls without slipping and friction between the beam and ball is negligible. The constants and variables for this example are defined as follows: (m) mass of the ball = 0.11 kg (R) radius of the ball = 0.015 m (d) lever arm offset = 0.03 m (9) gravitational acceleration = -9.8 m/s? (L) length of the beam = 1.0 m (J) ball's moment of inertia = 9.99 x 10-6 kg.m? (r) ball position coordinate (a) beam angle coordinate (0) servo gear angle 1. The second derivative of the input angle a actually affects the second derivative of r. However, we ignore this contribution. The equation of motion for the ball is then given by the following: +m)#+mgsin a - mrå? = 0. (1) Linearize this equation about the beam angle a = 0 and the velocity å = 0. The equation which relates the beam angle to the angle of the gear can be approximated as linear by the equation below: d. (2) Using (1) and (2), compute the open-loop transfer function G(s) =8. 2. Compute the poles and zeros of the open-loop transfer function G(s). 3. Using inverse Laplace transform, compute the step response for the open-loop system.
Expert Answer:

Related Book For 
Posted Date:
Students also viewed these physics questions
-
For Figure, assume that the cylinder rolls without slipping and use conservation of energy to derive the equation of motion in terms of x. k2
-
For Figure, assume that the cylinder rolls without slipping and use the Rayleigh method to obtain an expression for the natural frequency of the system. The equilibrium position corresponds to x = 0....
-
A vertical tube is closed at one end and open to air at the other end. The air pressure is 1.01 105 Pa. The tube has a length of 0.75 m. Mercury (mass density = 13 600 kg/m3) is poured into it to...
-
A trader depreciates his vehicles at 40% per annum using the reducing balance method, with proportionate depreciation in the year of acquisition. In addition to vehicles acquired on 1 July 2010 for...
-
a. If the open-tube manometer in Exercise 22 contains a nonvolatile silicone oil (density = 1.30 g/cm 3 ) instead of mercury (density = 13.6 g/ cm 3 ), what are the pressures in the flask as shown in...
-
K. Nelson project manager of Print Software, Inc., wants you to prepare a project network; compute the early, late, and slack activity times; determine the planned project duration; and identify the...
-
Which of the following was not a major goal when the EDP Auditors Foundation established the CISA examination? a. Providing a basis for a disciplinary mechanism within the information systems audit...
-
Li Ming Yuan and Tiffany Shaden are the department heads for the accounting department and human resources department, respectively, at a large textile firm in the southern United States. They have...
-
Brower, Inc., just constructed a manufacturing plant in Ghana. The construction cost 1 1 billion Ghanaian cedi. Brower intends to leave the plant open for three years. During the three years of...
-
Valley Pizzas owner bought his current pizza oven two years ago for $9,000, and it has one more year of life remaining, lie is using straight-line depreciation for the oven. He could purchase a new...
-
Date Accounts Debit ($) Credit ($) 1/01/2022 Cash A/c Dr 20000 To Capital 20000 1/01/2022 Purchase A/c Dr 5000 To Cash 5000 1/01/2022 Purchase A/c Dr 1000 To Cash 1000 1/01/2022 Insurance A/c Dr 1500...
-
What is materiality?
-
What are control risk assessment procedures?
-
What is the difference between a primary beneficiary relationship and a foreseen party relationship?
-
Before accepting an audit engagement, the auditor should identify special circumstances and unusual risks. a. Why is it important to identify the intended users of financial statements? b. Why should...
-
What is the difference between a privity relationship and a primary beneficiary relationship?
-
Following your analyses on age and pressure, you decide to exercise methodological control over the age variable. You therefore analyze the psychological and physiological correlates of blood...
-
What are the three kinds of research types? Explain each type.
-
(a) Suppose that a NASCAR race car is moving to the right with a constant velocity of 182 m/s. What is the average acceleration of the car? (b) Twelve seconds later, the car is halfway around the...
-
Multiple-Concept Example 4 illustrates the concepts that are pertinent to this problem. A cylindrical brass rod (cross-sectional area = 1.3 10-5 m2) hangs vertically straight down from a ceiling....
-
A converging lens (f = 12.0 cm) is held 8.00 cm in front of a newspaper that has a print size with a height of 2.00 mm. Find (a) The image distance (in cm) (b) The height (in mm) of the magnified...
-
Implement your own version of the AddFlow command described in this section.
-
Devise a graph in which at some step the maximal flow algorithm will reduce the flow along a reverse edge.
-
In the problem of Example 3, suppose that in breadth-first search, vertex 4 is labeled first, before vertex 2 , so that vertex 3 will be labeled by vertex 4 rather than vertex 2 . Carry out the...

Study smarter with the SolutionInn App