

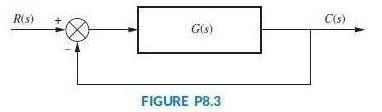
For the unity feedback system shown in Figure P8.3, where do the following: a. Sketch the root
Question:
For the unity feedback system shown in Figure P8.3, where
do the following:
a. Sketch the root locus.
b. Find the asymptotes.
c. Find the range of gain, K, that makes the system stable.
d. Find the breakaway points.
e. Find the value of K that yields a closed-loop step response with 25% overshoot.
f. Find the location of higher-order closed-loop poles when the system is operating with 25% overshoot.
g. Discuss the validity of your second-order approximation.
h. Use MATLAB to obtain the closed-loop step response to validate or refute your second-order approximation.
Step by Step Answer:

This question has not been answered yet.
You can Ask your question!
Related Book For 

Question Posted:
