

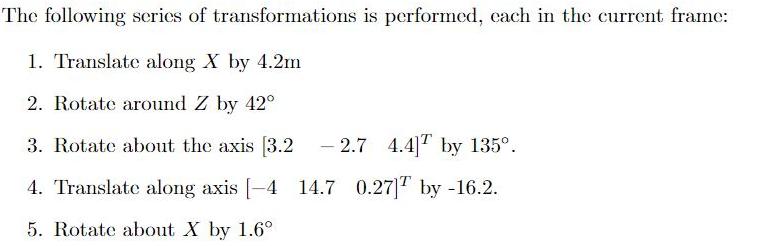
The following series of transformations is performed, each in the current frame: 1. Translate along X...
Fantastic news! We've Found the answer you've been seeking!
Question:
Expert Answer:

Posted Date:
