

Design a PI controller to drive the step-response error to zero for the unity feedback system shown
Question:
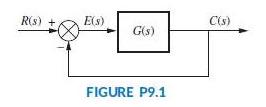
Design a PI controller to drive the step-response error to zero for the unity feedback system shown in Figure P9.1, where
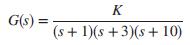
The system operates with a damping factor of 0.4. Design for each of the following two cases: (1) compensator zero at -0.1, and (2) compensator zero at -0.7. Compare the specifications of the uncompensated and each one of the compensated systems. Simulate each one of the systems using any software program.
Fantastic news! We've Found the answer you've been seeking!
Step by Step Answer:

Answered By
PALASH JHANWAR
I am a Chartered Accountant with AIR 45 in CA - IPCC. I am a Merit Holder ( B.Com ). The following is my educational details.
PLEASE ACCESS MY RESUME FROM THE FOLLOWING LINK: https://drive.google.com/file/d/1hYR1uch-ff6MRC_cDB07K6VqY9kQ3SFL/view?usp=sharing
3+ Reviews
10+ Question Solved
Related Book For 

Question Posted:
