

Consider the robot arm joint control system of Fig. P7.5-4. This system is described in Problem 1.5-4.
Question:
Consider the robot arm joint control system of Fig. P7.5-4. This system is described in Problem 1.5-4. For this problem, T = 0.1 s and D(z) = 1. It was shown in Problem 6-7 that
(a) Write the closed-loop system characteristic equation.
(b) Use the Routh–Hurwitz criterion to determine the range of K for stability.
(c) Check the results of part (b) using the Jury test.
(d) Determine the location of all roots of the characteristic equation in both the w-plane and the z-plane for the value of K 7 0 for which the system is marginally stable.
(e) Determine both the s-plane frequency and the w-plane frequency at which the system will oscillate when marginally stable, using the results of part (d).
(f) Show that the frequencies in part (e) satisfy (7-10).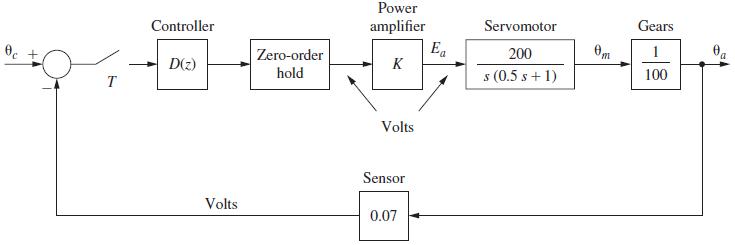
Step by Step Answer:
a 1 KGz H0z 18187z081870001311Kz 0001226K chareq Qz z 181870001311K z08187...View the full answer



Digital Control System Analysis And Design
ISBN: 9780132938310
4th Edition
Authors: Charles Phillips, H. Nagle, Aranya Chakrabortty
