

Question
Consider the system x = 0 -1 -2 -3 1 1 x + U, y = x2. 0 Design a dynamic output feedback controller
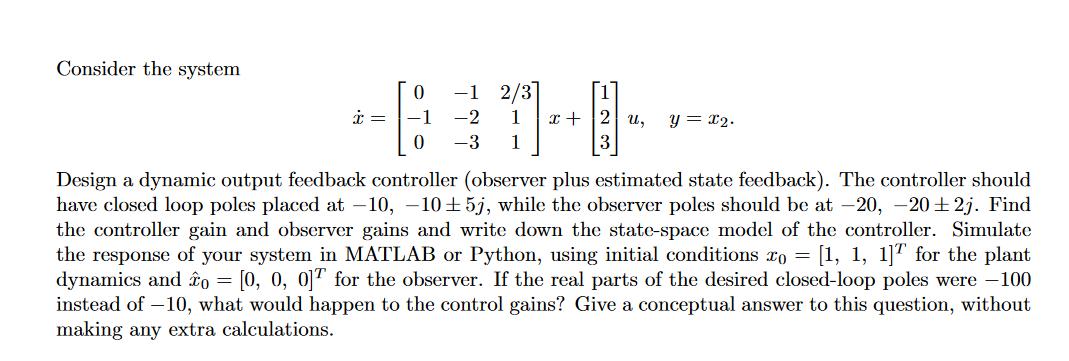
Consider the system x = 0 -1 -2 -3 1 1 x + U, y = x2. 0 Design a dynamic output feedback controller (observer plus estimated state feedback). The controller should have closed loop poles placed at -10, -105j, while the observer poles should be at -20, -20+2j. Find the controller gain and observer gains and write down the state-space model of the controller. Simulate the response of your system in MATLAB or Python, using initial conditions xo = [1, 1, 1] for the plant dynamics and to = [0, 0, 0] for the observer. If the real parts of the desired closed-loop poles were -100 instead of -10, what would happen to the control gains? Give a conceptual answer to this question, without making any extra calculations.
Step by Step Solution
3.32 Rating (122 Votes )
There are 3 Steps involved in it
Step: 1
Controller and Observer Design Using the Ackermanns formula the state feedback gain matrix and obser...
Get Instant Access with AI-Powered Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Applied Regression Analysis And Other Multivariable Methods
Authors: David G. Kleinbaum, Lawrence L. Kupper, Azhar Nizam, Eli S. Rosenberg
5th Edition
1285051084, 978-1285963754, 128596375X, 978-1285051086