

In this lab, we will use the inverse kinematics to identify two functions to generate an...
Fantastic news! We've Found the answer you've been seeking!
Question:

Transcribed Image Text:
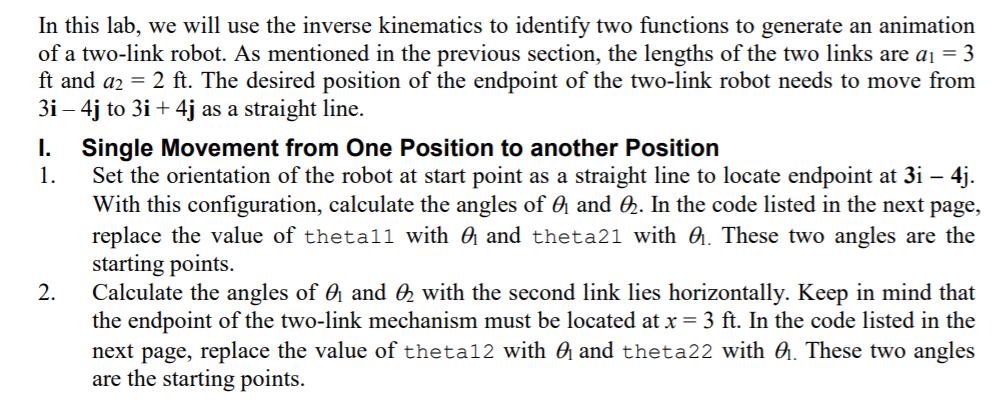
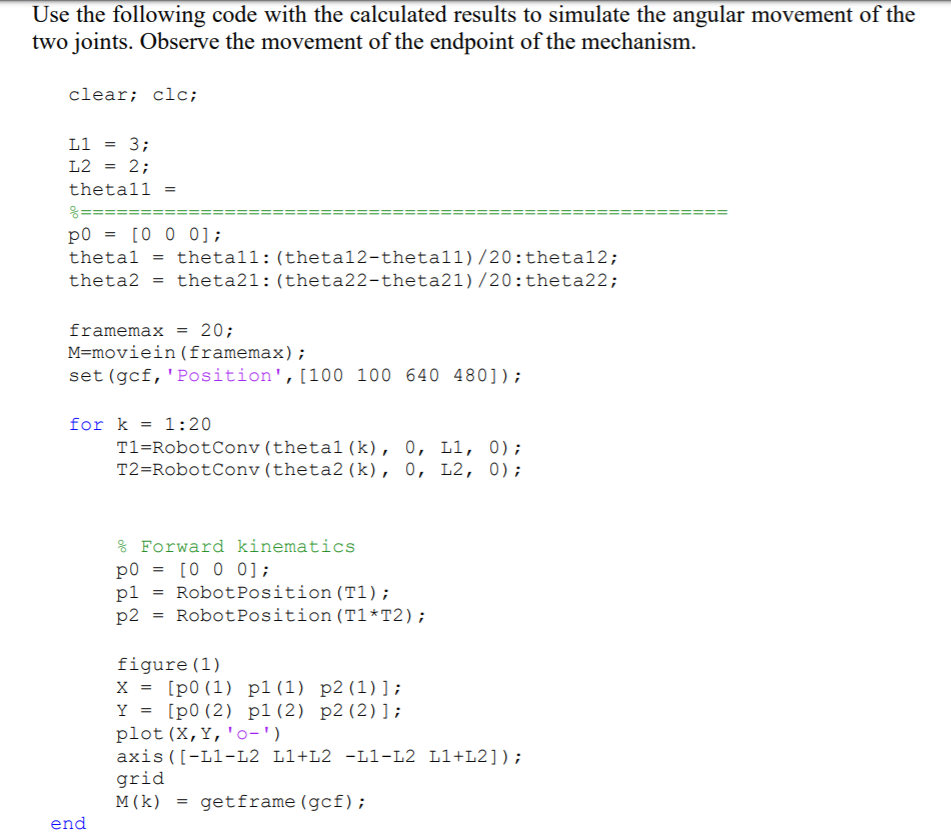
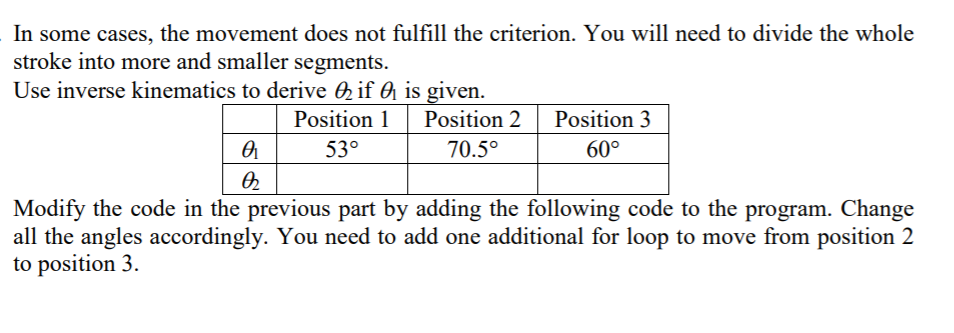
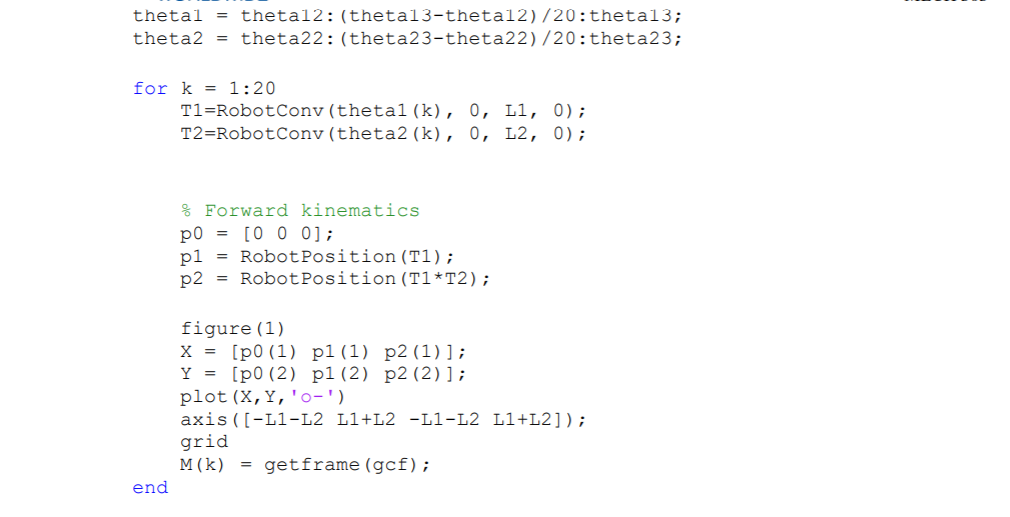
In this lab, we will use the inverse kinematics to identify two functions to generate an animation of a two-link robot. As mentioned in the previous section, the lengths of the two links are a₁ = 3 ft and a2 = 2 ft. The desired position of the endpoint of the two-link robot needs to move from 3i − 4j to 3i + 4j as a straight line. I. Single Movement from One Position to another Position 1. Set the orientation of the robot at start point as a straight line to locate endpoint at 3i – 4j. With this configuration, calculate the angles of & and §. In the code listed in the next page, replace the value of thetall with and theta21 with ₁. These two angles are the starting points. Calculate the angles of ₁ and 2 with the second link lies horizontally. Keep in mind that the endpoint of the two-link mechanism must be located at x = 3 ft. In the code listed in the next page, replace the value of theta12 with and theta22 with . These two angles are the starting points. 2. Use the following code with the calculated results to simulate the angular movement of the two joints. Observe the movement of the endpoint of the mechanism. clear; clc; L1 = 3; L2 = 2; thetall = %= po = [0 0 0]; thetal = theta2 = framemax = 20; M=moviein (framemax); set (gcf, 'Position', [100 100 640 480]); for k = 1:20 end thetall: (theta12-thetall) /20: theta12; theta21: (theta22-theta21) /20: theta22; T1=Robot Conv (thetal (k), 0, L1, 0); T2=RobotConv (theta2 (k), 0, L2, 0); % Forward kinematics po [0 0 0]; pl Robot Position (T1); p2 = Robot Position (T1*T2); = = figure (1) X= [p0 (1) p1 (1) p2 (1) ]; Y = [p0 (2) p1 (2) p2 (2) ]; plot (X, Y, '0- ') axis ([-L1-L2 L1+L2 -L1-L2 L1+L2]); grid M(K) = getframe (gcf); In some cases, the movement does not fulfill the criterion. You will need to divide the whole stroke into more and smaller segments. Use inverse kinematics to derive if Position 1 53° 0₁ க is given. Position 2 Position 3 70.5° 60° Modify the code in the previous part by adding the following code to the program. Change all the angles accordingly. You need to add one additional for loop to move from position 2 to position 3. thetal = thetal2: (thetal3-thetal2)/20: theta13; theta2 = theta22: (theta23-theta22) /20: theta23; for k=1:20 end T1=Robot Conv (thetal (k), 0, L1, 0); T2=RobotConv (theta2 (k), 0, L2, 0); & Forward kinematics p0 = [0 0 0]; pl = Robot Position (T1); p2 = Robot Position (T1*T2); figure (1) X = [p0 (1) p1 (1) p2 (1) 1; Y [p0 (2) p1 (2) p2 (2) ] ; plot (X, Y, '¹0-') axis ([-L1-L2 L1+L2 -L1-L2 L1+L2]); grid M(K) = getframe (gcf); In this part, you need to plan the trajectory from 3i − 4j to 3i + 4j as a straight line. Generate a table with all the planned angles. Write the code and simulate the movement of the two-link mechanism. In this lab, we will use the inverse kinematics to identify two functions to generate an animation of a two-link robot. As mentioned in the previous section, the lengths of the two links are a₁ = 3 ft and a2 = 2 ft. The desired position of the endpoint of the two-link robot needs to move from 3i − 4j to 3i + 4j as a straight line. I. Single Movement from One Position to another Position 1. Set the orientation of the robot at start point as a straight line to locate endpoint at 3i – 4j. With this configuration, calculate the angles of & and §. In the code listed in the next page, replace the value of thetall with and theta21 with ₁. These two angles are the starting points. Calculate the angles of ₁ and 2 with the second link lies horizontally. Keep in mind that the endpoint of the two-link mechanism must be located at x = 3 ft. In the code listed in the next page, replace the value of theta12 with and theta22 with . These two angles are the starting points. 2. Use the following code with the calculated results to simulate the angular movement of the two joints. Observe the movement of the endpoint of the mechanism. clear; clc; L1 = 3; L2 = 2; thetall = %= po = [0 0 0]; thetal = theta2 = framemax = 20; M=moviein (framemax); set (gcf, 'Position', [100 100 640 480]); for k = 1:20 end thetall: (theta12-thetall) /20: theta12; theta21: (theta22-theta21) /20: theta22; T1=Robot Conv (thetal (k), 0, L1, 0); T2=RobotConv (theta2 (k), 0, L2, 0); % Forward kinematics po [0 0 0]; pl Robot Position (T1); p2 = Robot Position (T1*T2); = = figure (1) X= [p0 (1) p1 (1) p2 (1) ]; Y = [p0 (2) p1 (2) p2 (2) ]; plot (X, Y, '0- ') axis ([-L1-L2 L1+L2 -L1-L2 L1+L2]); grid M(K) = getframe (gcf); In some cases, the movement does not fulfill the criterion. You will need to divide the whole stroke into more and smaller segments. Use inverse kinematics to derive if Position 1 53° 0₁ க is given. Position 2 Position 3 70.5° 60° Modify the code in the previous part by adding the following code to the program. Change all the angles accordingly. You need to add one additional for loop to move from position 2 to position 3. thetal = thetal2: (thetal3-thetal2)/20: theta13; theta2 = theta22: (theta23-theta22) /20: theta23; for k=1:20 end T1=Robot Conv (thetal (k), 0, L1, 0); T2=RobotConv (theta2 (k), 0, L2, 0); & Forward kinematics p0 = [0 0 0]; pl = Robot Position (T1); p2 = Robot Position (T1*T2); figure (1) X = [p0 (1) p1 (1) p2 (1) 1; Y [p0 (2) p1 (2) p2 (2) ] ; plot (X, Y, '¹0-') axis ([-L1-L2 L1+L2 -L1-L2 L1+L2]); grid M(K) = getframe (gcf); In this part, you need to plan the trajectory from 3i − 4j to 3i + 4j as a straight line. Generate a table with all the planned angles. Write the code and simulate the movement of the two-link mechanism.
Expert Answer:

Related Book For 
Posted Date:
Students also viewed these physics questions
-
In this exercise we will use the expressions given in section 9.6.3 on page 271 and in section 9.8.5 on page 296 to calculate the relaxation rate constants which arise from the dipolar relaxation of...
-
In this question we will use the sentences you wrote in Exercise 9.9 to answer a question using a backward-chaining algorithm. a. Draw the proof tree generated by an exhaustive backward-chaining...
-
For this problem we will use the data in the file Global100 that was referenced in Section 3.4 as an example for creating a treemap. Here we will use these data to create a GIS chart. A portion of...
-
A psychologist shows a list of eight activities to a subject in an experiment. How many ways can the subject pick a first, second, and third activity? a. Identify the total number of objects n and...
-
A bee was flying upward along the curve that is the inter-section of z = x4 xy3 + 12 with the plane x = 1. At the point (1, -2, 5), it went off on the tangent line. Where did the bee hit the xz-plane?
-
Following is a map of the Olympic Peninsula in the state of Washington. Using the scale on the map, estimate the distance of the route shown in red, starting at Forks and ending at Sequim, passing...
-
Hemlock Semiconductor Operations, LLC, and SolarWorld Industries Sachsen GmbH, are both companies involved in the manufacture of components for solar power products. Prior to the lawsuit, the two...
-
The Carlson Department Store suffered heavy damage when a hurricane struck on August 31, 2003. The store was closed for four months (September 2003 through December 2003), and Carlson is now involved...
-
Arbon Company has three service departments and two operating departments. Selected data concerning the five departments are presented below: Costs Number of employees Square metres of space occupied...
-
How might you combine social entrepreneurship with traditional options for going global?
-
Diego Ronda, a builder, has just completed the purchase of Mantle Place, Hertfordshire, a large house with extensive grounds, from Daphne Deadwood. He plans to divide Mantle Place into five flats and...
-
Mary Berry is evaluating two mutually exclusive projects (expected cash flows shown below). The firm's cost of capital is 11 percent. (Round each amount to the nearest cent.) Year Project A Project B...
-
Why do we list each expense and revenue during the closing process? Wouldn't it be easier to debit a generic revenue account for all revenues and credit a generic expense account for all expenses?
-
Tax preparers are required to complete and file a due diligence checklist when preparing a claim for the American Opportunity Tax Credit. What form must be used for this purpose?
-
A paralegal, has been told that if he bills $1,500 hours by January 1 of next year, he will receive a bonus. On December 1, Brad realizes he is within 200 hours of reaching his goal. What are some of...
-
NFPO policy is to record contributions receivable when the criteria of section 4420 have been met. over the past five years the NFPO pledge tocollection statistics have always been 80 percent. For...
-
A car of mass 772 kg is traveling 29.9 m/s when the driver applies the brakes, which lock the wheels. The car skids for 5.67 s in the positive x-direction before coming to rest. HINT (a) What is the...
-
The roof of a refrigerated truck compartment is of composite construction, consisting of a layer of foamed urethane insulation (t2 = 50 mm, ki = 0.026 W/m K sandwiched between aluminum alloy panels...
-
Using the approach described in section 6.8.1 on page 127, show that for a spin described by the wavefunction the matrix representation of the density operator is given by W) = c, la) + cgB).
-
Following the approach of section 3.5 on page 35, show that Ïa.1 Ïa.2 is an eigenfunction of the Hamiltonian for two spins with no coupling between them: Hence find the corresponding...
-
Write the following in Dirac notation: Express the following statements in Dirac notation: (a) Ïa is normalized; (b) Ïa and Ïβ are orthogonal; (c) Ïa is an...
-
If the ball accelerates uniformly when it hits the floor, what is its approximate acceleration as it comes to rest before rebounding? A. \(1000 \mathrm{~m} / \mathrm{s}^{2}\) B. \(2000 \mathrm{~m} /...
-
How fast is the ball moving when it hits the concrete surface? (Ignore air resistance.) A. \(5 \mathrm{~m} / \mathrm{s}\) B. \(7 \mathrm{~m} / \mathrm{s}\) C. \(25 \mathrm{~m} / \mathrm{s}\) D. \(50...
-
The ball's kinetic energy just after the bounce is less than just before the bounce. In what form does this lost energy end up? A. Elastic potential energy B. Gravitational potential energy C....

Study smarter with the SolutionInn App