

One important issue of integrating multiple sensors and actuators within a single system is how the digital/analog
Question:
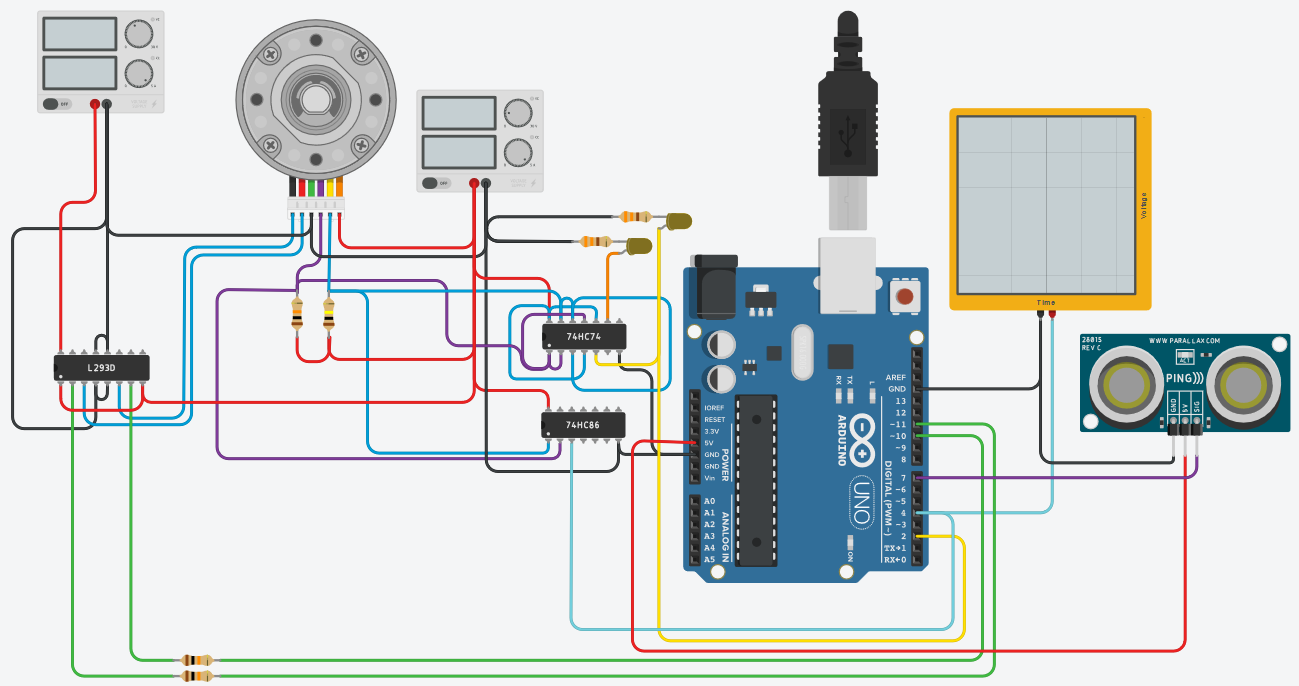
One important issue of integrating multiple sensors and actuators within a single system is how the digital/analog pins can be arranged and how to specify the required sample rate of the system. For example, the closed-loop control application in the previous module requires two digital pins to control the DC motor and one pin for encoder measurement. If we want to control a mobile robot, two sets of this combination require six digital pins. If distance sensors are required to avoid a collision, additional digital pins need to be considered. In this module, the system developed in the previous module will be expanded. We will emulate the mobile robot application and use four sensors and two actuators.
Distance Detector
In Module 4, we used ultrasonic sensors to detect the distance in front of the sensor. For a collision avoidance robot, the basic idea is similar:
- If the robot is far away from an obstacle, it runs at full speed linearly.
- If the obstacle is close to one side, then the robot needs to turn. After the obstacle is far away enough, then the robot moves linearly again.
- If the obstacle is too close to both sides, then the robot stops.
Thus, the programming of this mobile robot requires some logical judgment based on sensor feedback. We will start from a single set of the combination of an ultrasonic sensor, a DC motor, a PWM actuator, and a rotary encoder. The configuration based on what we have learned in Modules 4, 6, 7, and 8 can be put together to synthesize a complete system. You can download that configuration fromMotor Control with H-Bridge/Tinkercad.comLinks to an external site..
Expert Answer:


Database Systems Design Implementation and Management
ISBN: 978-1285196145
11th edition
Authors: Carlos Coronel, Steven Morris
