

Please help me to rebulid the codes to fix the error of 'NoneType' object is not callable
Fantastic news! We've Found the answer you've been seeking!
Question:
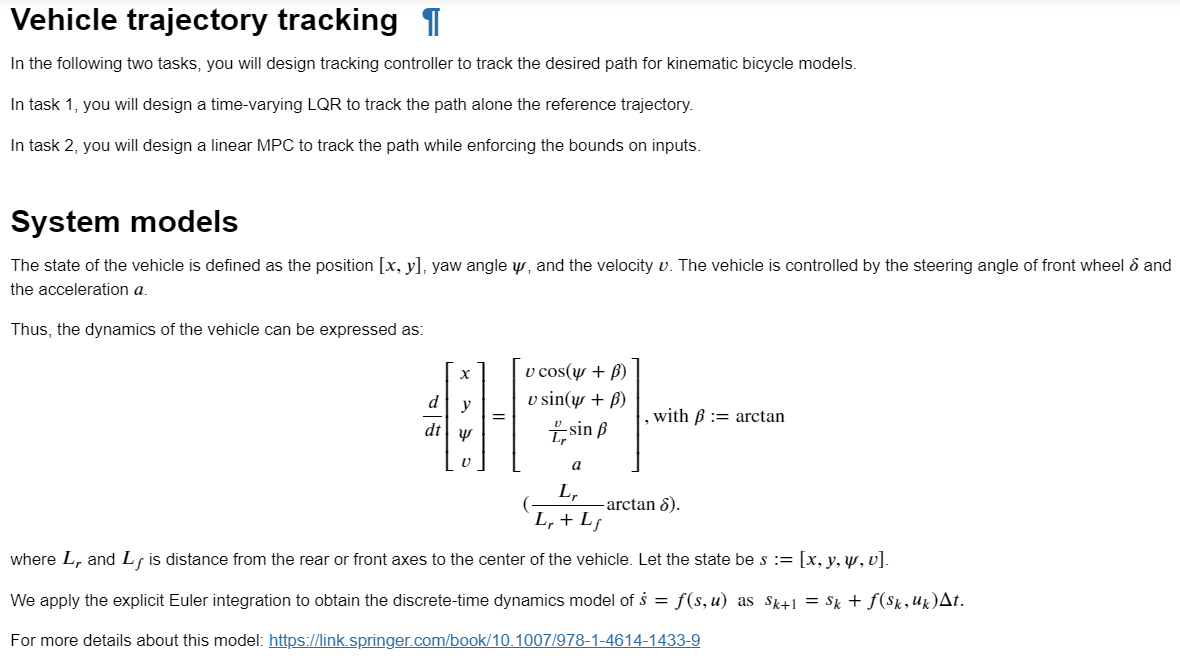
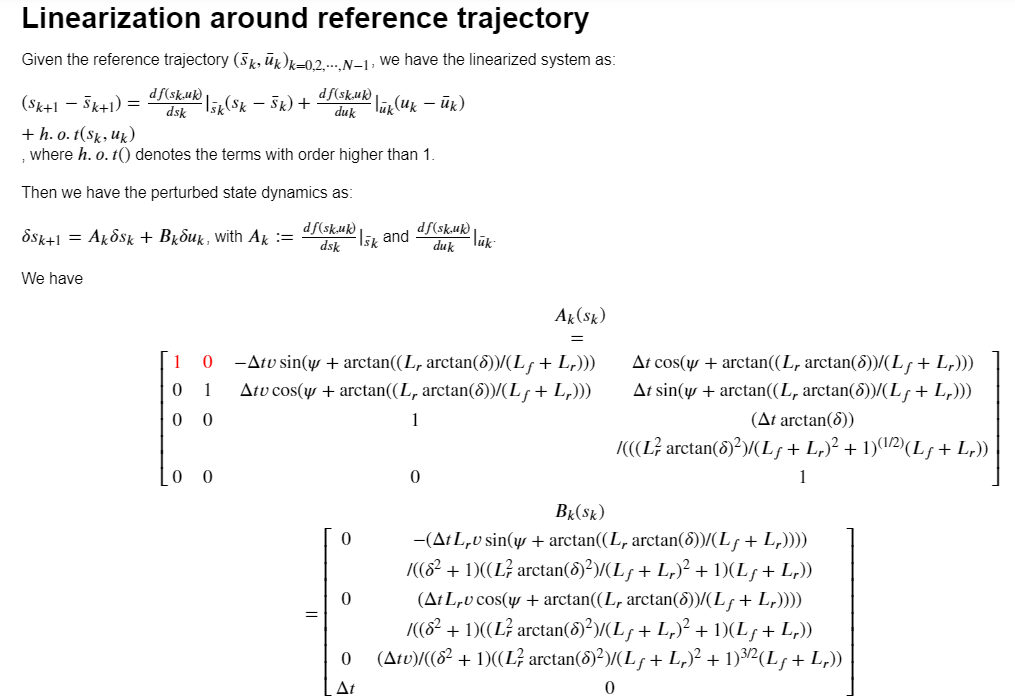
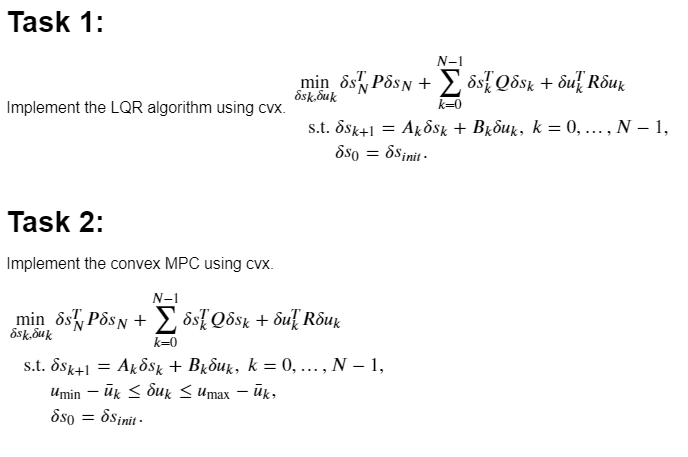
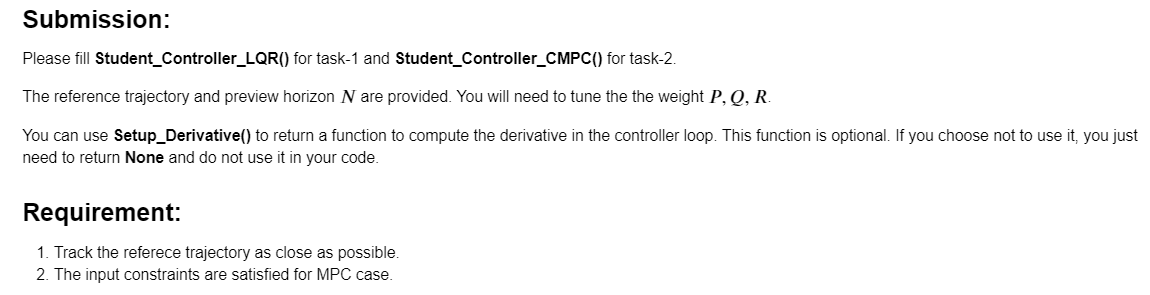
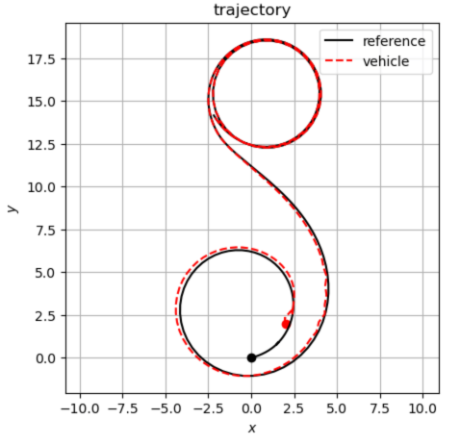
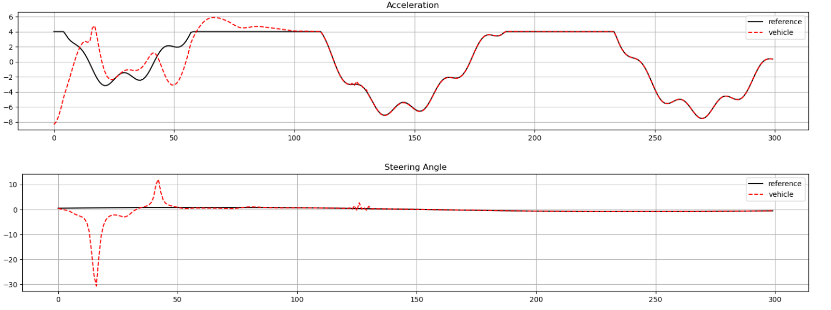
Please help me to rebulid the codes to fix the error of "'NoneType' object is not callable" for both LQR and MPC, and help me to check and rewrite the wrong part as I can not output the figure shown as an example as follows:
The codes are:
import numpy as np import cvxpy as cp def Setup_Derivative(param): ## this function is optional ## TODO return None # TODO def Fun_Jac_dt(x, u, param): L_f = param["L_r"] L_r = param["L_f"] h = param["h"] psi = x[2] v = x[3] delta = u[0] a = u[1] A = np.zeros((4, 4)) B = np.zeros((4, 2)) A[0, 0] = 1 A[0, 2] = -h*v*np.sin(psi+np.arctan((L_r*np.arctan(delta))/(L_f+L_r))) A[0, 3] = h*np.cos(psi+np.arctan((L_r*np.arctan(delta))/(L_f+L_r))) A[1, 1] = 1 A[1, 2] = -h*v*np.cos(psi+np.arctan((L_r*np.arctan(delta))/(L_f+L_r))) A[1, 3] = h*np.sin(psi+np.arctan((L_r*np.arctan(delta))/(L_f+L_r))) A[2, 2] = 1 A[2, 3] = (h*np.arctan(delta)/(((L_r**2*delta**np.arctan(delta)**2)/(L_f+L_r)**2 + 1)**(1/2)*(L_f+L_r))) A[3, 3] = 1 B[0, 1] = -(h*L_r*v*np.sin(psi+np.arctan((L_r*np.arctan(delta))/(L_f+L_r))))/((delta**2 + 1)*((L_r**2*np.arctan(delta)**2)/(L_f+L_r)**2+1)*(L_f+L_r)) B[1, 1] = (h*L_r*v*np.cos(psi+np.arctan((L_r*np.arctan(delta))/(L_f+L_r))))/((delta**2 + 1)*((L_r**2*np.arctan(delta)**2)/(L_f+L_r)**2+1)*(L_f+L_r)) B[2, 1] = (h*v)/((delta**2 + 1)*((L_r**2*np.arctan(delta)**2)/(L_f+L_r)**2+1)**(3/2)*(L_f+L_r)) B[3, 0] = h return [A, B] def Student_Controller_LQR(x_bar, u_bar, x0, Fun_Jac_dt, param): dim_state = x_bar.shape[1] dim_ctrl = u_bar.shape[1] n_u = u_bar.shape[0] * u_bar.shape[1] n_x = x_bar.shape[0] * x_bar.shape[1] n_var = n_u + n_x n_eq = x_bar.shape[1] * u_bar.shape[0] n_ieq = u_bar.shape[1] * u_bar.shape[0] # Define the parameters Q = np.eye(4) Q[0, 0] = 10000 Q[3, 3] = 10000 Q[1, 1] = 200000 Q[2, 2] = 10000 R = np.eye(2) R[0, 0] = 9000 R[1, 1] = 7000 Pt = np.eye(4) * 10000 Pt = np.eye(4) * 10 #Define the cost function np.random.seed(1) P = np.zeros((n_var, n_var)) for k in range(u_bar.shape[0]): P[k * x_bar.shape[1]:(k+1) * x_bar.shape[1], k * x_bar.shape[1]:(k+1) * x_bar.shape[1]] = Q P[n_x + k * u_bar.shape[1]:n_x + (k+1) * u_bar.shape[1], n_x + k * u_bar.shape[1]:n_x + (k+1) * u_bar.shape[1]] = R P[n_x - x_bar.shape[1]:n_x, n_x - x_bar.shape[1]:n_x] = Pt P = (P + P.T) / 2 q = np.zeros((n_var, 1)) # Define the constraints A = np.zeros((n_eq, n_var)) b = np.zeros(n_eq) G = np.zeros((n_ieq, n_var)) ub = np.zeros(n_ieq) lb = np.zeros(n_ieq) u_lb = param["delta_lim"] u_ub = param["a_lim"] for k in range(u_bar.shape[0]): AB = Fun_Jac_dt(x_bar[k,:], u_bar[k,:], param) A[k*dim_state:(k+1)*dim_state, dim_state:(k+1)*dim_state] = AB[0] A[k*dim_state:(k+1)*dim_state, (k+1)*dim_state:(k+2)*dim_state] = -np.eye(dim_state) A[k*dim_state:(k+1)*dim_state, n_x + k*dim_ctrl:n_x + (k+1)*dim_ctrl] = AB[1] G[k*dim_ctrl:(k+1)*dim_ctrl, n_x + k*dim_ctrl:n_x + (k+1)*dim_ctrl] = np.eye(dim_ctrl) ub[k*dim_ctrl:(k+1)*dim_ctrl] = u_ub - u_bar[k,:] lb[k*dim_ctrl:(k+1)*dim_ctrl] = u_lb - u_bar[k,:] # Define and solve the CVXPY problem x = cp.Variable(n_var) cons = [A @ x == b, x[0:dim_state] == x0 - x_bar[0, :]] prob = cp.Problem(cp.Minimize((1/2)*cp.quad_form(x, P) + q.T @ x), cons) prob.solve(verbose=False, max_iter = 10000) return (x.value[n_x:n_x + dim_ctrl] + u_bar[0, :]) def Student_Controller_CMPC(x_bar, u_bar, x0, Fun_Jac_dt, param): dim_state = u_bar.shape[1] dim_ctrl = x_bar.shape[1] n_u = u_bar.shape[0] * u_bar.shape[1] n_x = x_bar.shape[0] * x_bar.shape[1] n_var = n_u + n_x n_eq = x_bar.shape[0] * u_bar.shape[1] n_ieq = u_bar.shape[1] * x_bar.shape[1] # Define the parameters Pt = np.eye(4) * 700 Q = np.eye(4) * 100 R = np.eye(2) * 200000 # Define the cost funcgion np.random.seed(1) P = np.zeros((n_var, n_var)) for k in range(u_bar.shape[0]): P[k * x_bar.shape[1]:(k+1) * x_bar.shape[1], k * x_bar.shape[1]:(k+1) * x_bar.shape[1]] = Q P[n_x + k * u_bar.shape[1]:n_x + (k+1) * u_bar.shape[1], n_x + k * u_bar.shape[1]:n_x + (k+1) * u_bar.shape[1]] = R P[n_x - x_bar.shape[1]:n_x, n_x - x_bar.shape[1]:n_x] = Pt P = (P + P.T) / 2 q = np.zeros((n_var, 1)) # Define the constraints A = np.zeros((n_eq, n_var)) b = np.zeros(n_eq) G = np.zeros((n_ieq, n_var)) ub = np.zeros(n_ieq) lb = np.zeros(n_ieq) u_lb = param["delta_lim"] u_ub = param["a_lim"] for k in range(u_bar.shape[0]): AB = Fun_Jac_dt(x_bar[k,:], u_bar[k,:], param) A[k*dim_state:(k+1)*dim_state, dim_state:(k+1)*dim_state] = AB[0] A[k*dim_state:(k+1)*dim_state, (k+1)*dim_state:(k+2)*dim_state] = -np.eye(dim_state) A[k*dim_state:(k+1)*dim_state, n_x + k*dim_ctrl:n_x + (k+1)*dim_ctrl] = AB[1] G[k*dim_ctrl:(k+1)*dim_ctrl, n_x + k*dim_ctrl:n_x + (k+1)*dim_ctrl] = np.eye(dim_ctrl) ub[k*dim_ctrl:(k+1)*dim_ctrl] = u_ub - u_bar[k,:] lb[k*dim_ctrl:(k+1)*dim_ctrl] = u_lb - u_bar[k,:] # Define and solve the CVXPY problem. x = cp.Variable(n_var) cons = [G @ x <= ub, lb <= G @ x, A @ x == b, x[0:dim_state] == x0 - x_bar[0, :] ] prob = cp.Problem(cp.Minimize((1/2)*cp.quad_form(x, P) + q.T @ x), cons) prob.solve(verbose=False, max_iter = 10000) return [prob.objective.value, np.reshape(x.value[n_x:], u_bar.shape) + u_bar ]And the requirements are:
Expert Answer:

Related Book For 
Income Tax Fundamentals 2013
ISBN: 9781285586618
31st Edition
Authors: Gerald E. Whittenburg, Martha Altus Buller, Steven L Gill
Posted Date:
