

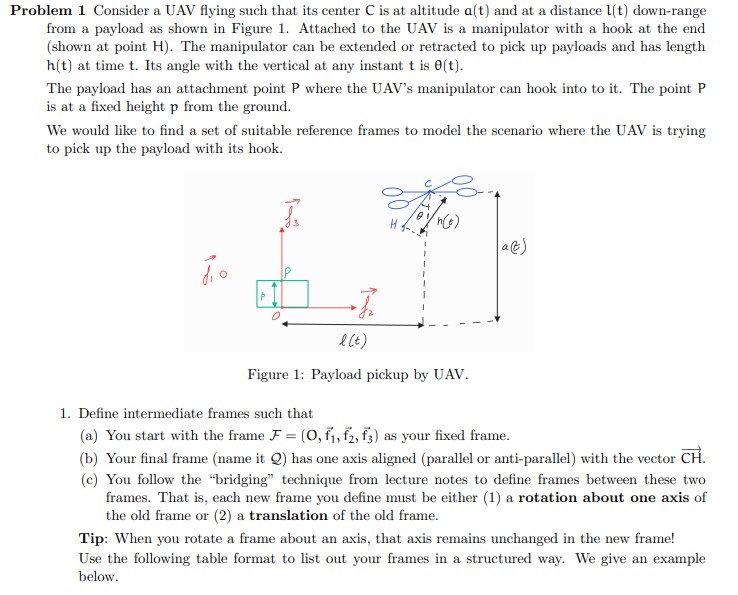
Problem 1 Consider a UAV flying such that its center C is at altitude a(t) and...
Fantastic news! We've Found the answer you've been seeking!
Question:
Expert Answer:

Related Book For 
Posted Date:
