

We will consider Example 3.5 in MLS (inverse kinematics of the elbow manipulator). Assume lo =...
Fantastic news! We've Found the answer you've been seeking!
Question:
Transcribed Image Text:
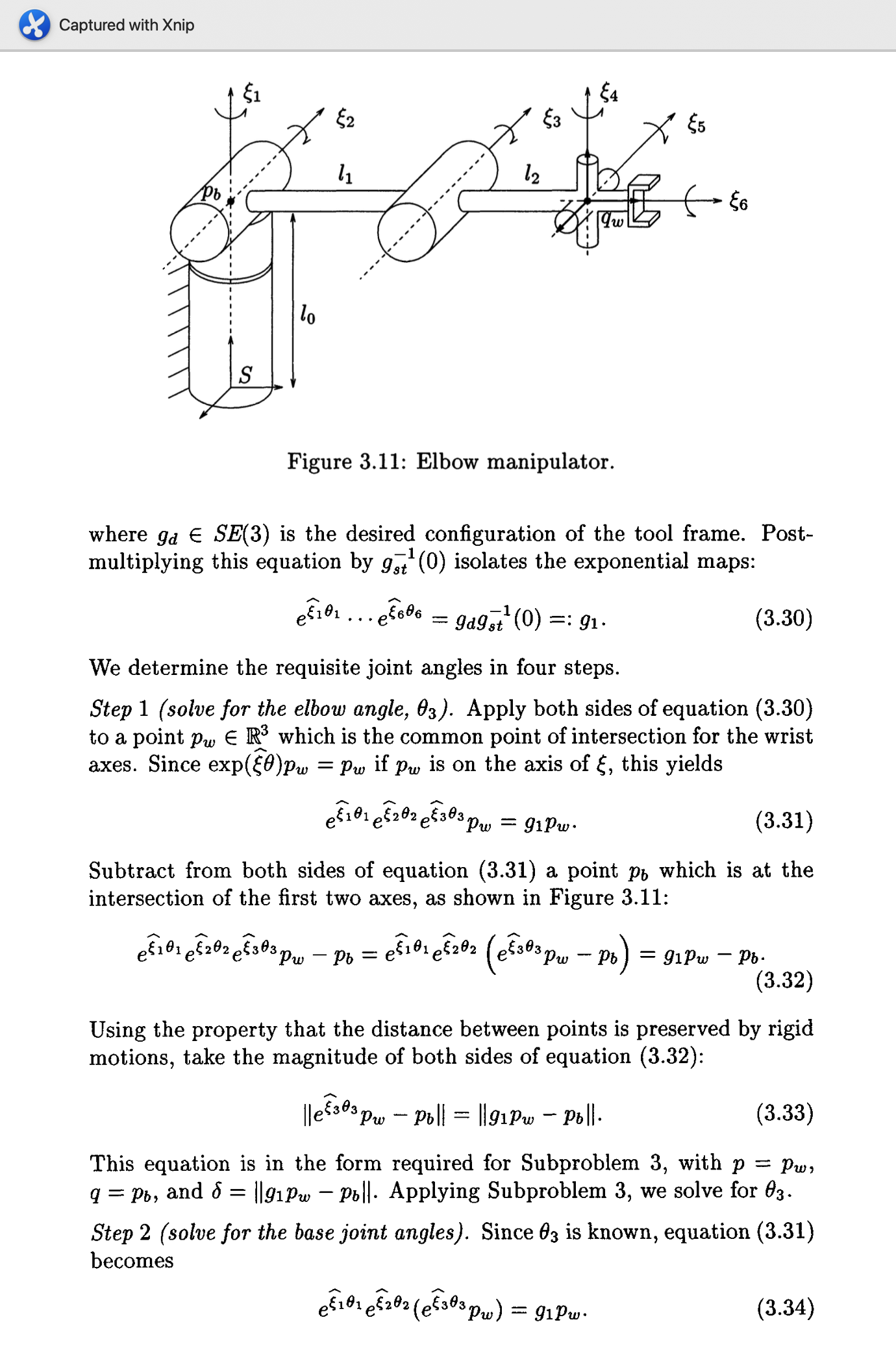
We will consider Example 3.5 in MLS (inverse kinematics of the elbow manipulator). Assume lo = 1 = = 1. And the desired pose of the end-effector is 9d )). 0.5 1.2 1.1 R(0.2 rad) R (0.4 rad) OT Find all the inverse kinematics solutions. You will need to write a Matlab script with Matlab functions for each subproblem. Example 3.5. Elbow manipulator inverse kinematics The elbow manipulator in Figure 3.11 consists of a three degree of freedom manipulator with a spherical wrist. This special structure simplifies the inverse kinematics and fits nicely with the subproblems presented earlier. The equation we wish to solve is 9st (0) = gst(0) = Id, e Captured with Xnip $ S lo E 1 --- $4 3 12 196 Figure 3.11: Elbow manipulator. Apol qw - where ga SE(3) is the desired configuration of the tool frame. Post- multiplying this equation by 9 (0) isolates the exponential maps: ef0... es gagst (0) =: 91. We determine the requisite joint angles in four steps. Step 1 (solve for the elbow angle, 03). Apply both sides of equation (3.30) to a point pw E R which is the common point of intersection for the wrist axes. Since exp(0)pw = pw if pw is on the axis of , this yields 10 202 303 pw = 91Pw. (3.31) Subtract from both sides of equation (3.31) a point p, which is at the intersection of the first two axes, as shown in Figure 3.11: e0030w Pb = e0 202 (e03pw - Pb) 202 ( || e$ 303, Pw $5 to $6 Pw - Pb|| = ||91Pw Pb||. - (3.30) Using the property that the distance between points is preserved by rigid motions, take the magnitude of both sides of equation (3.32): = 91Pw - Pb. (3.32) (3.33) This equation is in the form required for Subproblem 3, with p = Pw, q = Pb, and 6 = ||91Pw - Pb||. Applying Subproblem 3, we solve for 03. Step 2 (solve for the base joint angles). Since 03 is known, equation (3.31) becomes ef101 202 (ef303 pw) = 91.pw. (3.34) exp(303)pw and q = 9Pw gives the Step 3 (solve for two of three wrist angles). The remaining kinematics can be written as Applying Subproblem 2 with p = values for and 02. -1 04 05 06 = e-303 e-202e-101 gag=+ (0) =: 92. (3.35) Apply both sides of equation (3.35) to a point p which is on the axis of 6 but not on the 4, 5 axes. This gives 404 505 p = 92P. Apply Subproblem 2 to find 04 and 05. Step 4 (solve for the remaining wrist angle). The only remaining un- known is 06. Rearranging the kinematics equation and applying both sides to any point p which is not on the axis of $6, ga9st (0)p =: q. escoop 2-E505 e - 04... e- e-101 (3.36) 'p = e' (3.37) Apply Subproblem 1 to find 06. At the end of this procedure, 0 through 06 are determined. There are a maximum of eight possible solutions, due to multiple solutions for equations (3.33), (3.34), and (3.36). Note that the overall procedure is to first solve for the three angles which determine the position of the center of the wrist and then solve for the wrist angles. We will consider Example 3.5 in MLS (inverse kinematics of the elbow manipulator). Assume lo = 1 = = 1. And the desired pose of the end-effector is 9d )). 0.5 1.2 1.1 R(0.2 rad) R (0.4 rad) OT Find all the inverse kinematics solutions. You will need to write a Matlab script with Matlab functions for each subproblem. Example 3.5. Elbow manipulator inverse kinematics The elbow manipulator in Figure 3.11 consists of a three degree of freedom manipulator with a spherical wrist. This special structure simplifies the inverse kinematics and fits nicely with the subproblems presented earlier. The equation we wish to solve is 9st (0) = gst(0) = Id, e Captured with Xnip $ S lo E 1 --- $4 3 12 196 Figure 3.11: Elbow manipulator. Apol qw - where ga SE(3) is the desired configuration of the tool frame. Post- multiplying this equation by 9 (0) isolates the exponential maps: ef0... es gagst (0) =: 91. We determine the requisite joint angles in four steps. Step 1 (solve for the elbow angle, 03). Apply both sides of equation (3.30) to a point pw E R which is the common point of intersection for the wrist axes. Since exp(0)pw = pw if pw is on the axis of , this yields 10 202 303 pw = 91Pw. (3.31) Subtract from both sides of equation (3.31) a point p, which is at the intersection of the first two axes, as shown in Figure 3.11: e0030w Pb = e0 202 (e03pw - Pb) 202 ( || e$ 303, Pw $5 to $6 Pw - Pb|| = ||91Pw Pb||. - (3.30) Using the property that the distance between points is preserved by rigid motions, take the magnitude of both sides of equation (3.32): = 91Pw - Pb. (3.32) (3.33) This equation is in the form required for Subproblem 3, with p = Pw, q = Pb, and 6 = ||91Pw - Pb||. Applying Subproblem 3, we solve for 03. Step 2 (solve for the base joint angles). Since 03 is known, equation (3.31) becomes ef101 202 (ef303 pw) = 91.pw. (3.34) exp(303)pw and q = 9Pw gives the Step 3 (solve for two of three wrist angles). The remaining kinematics can be written as Applying Subproblem 2 with p = values for and 02. -1 04 05 06 = e-303 e-202e-101 gag=+ (0) =: 92. (3.35) Apply both sides of equation (3.35) to a point p which is on the axis of 6 but not on the 4, 5 axes. This gives 404 505 p = 92P. Apply Subproblem 2 to find 04 and 05. Step 4 (solve for the remaining wrist angle). The only remaining un- known is 06. Rearranging the kinematics equation and applying both sides to any point p which is not on the axis of $6, ga9st (0)p =: q. escoop 2-E505 e - 04... e- e-101 (3.36) 'p = e' (3.37) Apply Subproblem 1 to find 06. At the end of this procedure, 0 through 06 are determined. There are a maximum of eight possible solutions, due to multiple solutions for equations (3.33), (3.34), and (3.36). Note that the overall procedure is to first solve for the three angles which determine the position of the center of the wrist and then solve for the wrist angles.
Expert Answer:

Related Book For 
Income Tax Fundamentals 2013
ISBN: 9781285586618
31st Edition
Authors: Gerald E. Whittenburg, Martha Altus Buller, Steven L Gill
Posted Date:
Students also viewed these mechanical engineering questions
-
Assume you have lost track of where you are in the computer system directory. How do you return to your home directory? Assuming you don't remember the full pathname of your home directory, how can...
-
Explain why leaders must align the strategic communication efforts to the organizational culture of the stakeholders with the current and future needs of the population and describe methods for...
-
Let A, B be sets. Define: (a) the Cartesian product (A B) (b) the set of relations R between A and B (c) the identity relation A on the set A [3 marks] Suppose S, T are relations between A and B, and...
-
If a price ceiling or price floor existed where you lived, would you be willing to purchase products on the black market? What would you identify as a consequence to engaging in transactions on the...
-
State the factor and the number of levels for the factor in each of the following tests. (a) A marine biologist measures the effectiveness of mating displays among tortoises in one of six...
-
Bojangles?, Inc. operates Cajun-themed fast-food restaurants. As of December 25, 2016, Bojangles? had 309 company-operated restaurants and 404 domestic franchised restaurants located in 11 states,...
-
Which statement about learning is not correct? (a) Learning is a change in behavior that results from experience. (b) People learn; organizations do not. (c) Experiential learning is common in OB...
-
Picasso Graphics is a graphics arts design consulting firm. Pablo Taylor, its treasurer and vice president of finance, has prepared a classified balance sheet as of July 31, 2014, the end of its...
-
What accounting information (general ledger) will come from each of these documents? - customer's purchase order - credit approval - sales order - production order or stock release - shipping notice...
-
An end loader for a small garden tractor is shown. All connections are pinned. The only significant weight is W . (a) Draw six FBDs, one each for members BC, DG, and AEF , plate CDE, hydraulic...
-
Students who major in business. It has been reported that 20.4% of incoming freshmen indicated that they will major in business or a related field. A random sample of 242 incoming college freshmen...
-
Innovation, Inc. is a company specializing in research and development. It accepts short-term research and development projects from other companies and aims to obtain results quickly. It has been...
-
a. Pay is the most important factor in determining how hard people work. b. The nature of the task people are doing is the most important factor in determining how hard people work. _____ After you...
-
a. The most effective leaders are those who give more emphasis to getting the work done than they do to relating to people. b. The most effective leaders are those who give more emphasis to relating...
-
a. Pay is the most important factor in determining how satisfied people are at work. b. The nature of the task people are doing is the most important factor in determining how satisfied people are at...
-
a. Satisfied workers produce more than workers who are not satisfied. b. Satisfied workers produce no more than workers who are not satisfied. _____ After you have circled the letter, indicate how...
-
This module lecture will focus on providing you with key terms you need to know with respect to social and self cognition. Look at attribution and self-justification. The Fundamental Attribution...
-
A stock has had returns of 8 percent, 26 percent, 14 percent, 17 percent, 31 percent, and 1 percent over the last six years. What are the arithmetic and geometric average returns for the stock?
-
Sally hires a maid to work in her home for $250 per month. The maid is 25 years old and not related to Sally. During 2012, the maid worked 10 months for Sally. a. What is the amount of Social...
-
For each of the following situations, indicate whether the taxpayer(s) is (are) required to file a tax return for 2012. Explain your answer. a. Helen is a single taxpayer with interest income in 2012...
-
During the 2012 tax year, Irma incurred the following expenses: Union dues..............................................................$275 Tax return preparation...
-
(a) Explain the limitations of HCA when prices are rising. (b) Why has the HCA model survived in spite of its shortcomings in times of inflation?
-
To what extent are CCA statements useful to an investor?
-
What factors should be taken into account when designing a system of accounting for inflation?

Study smarter with the SolutionInn App