

Consider the helicopter altitude control problem shown in the following diagram, where [ begin{aligned} J & =text
Question:
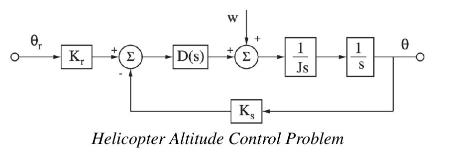
Consider the helicopter altitude control problem shown in the following diagram,
where \[
\begin{aligned}
J & =\text { helicopter inertia }, \\
\theta_{r}(t) & =\text { reference helicopter attitude, } \\
\theta(t) & =\text { actual helicopter attitude, } \\
K_{s} & =\text { sensor gain, } \\
K_{r} & =\text { reference scaling gain, } \\
\omega(t) & =\text { disturbance torque. }
\end{aligned}
\]
(a) Use proportional control \(D(s)=K_{P}\). Does this controller provide additional damping?
(b) Use PD control, \(D(s)=K_{P}+K_{D} s\). Determine the tracking and disturbance-rejection properties (i.e., find \(e_{s s}^{r}\) and \(e_{s s}^{w}\) ) for step inputs on \(\theta_{r}(t)\) and \(\omega(t)\).
(c) Use PI control, \(D(s)=K_{P}+\frac{K_{I}}{s}\). Discuss the effect of this controller on the stability of the system.
(d) Use PID control, \(D(s)=K_{P}+\frac{K_{I}}{s}+K_{D}\). Discuss the effect of this controller on the stability and steady-state errors of the system.
(e) What are the two system types (one with respect to the reference and the other with respect to the disturbance) when the PID controller is employed?
Step by Step Answer:



Design And Analysis Of Control Systems Driving The Fourth Industrial Revolution
ISBN: 9781032718804
2nd Edition
Authors: Arthur G O Mutambara
