

In the following rotational mechanical system, there is a driving torque (T(t)) exerted on disk (J_{1}) and
Question:
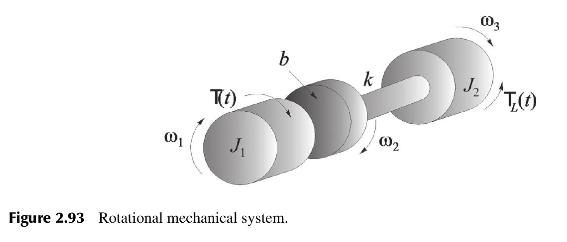
In the following rotational mechanical system, there is a driving torque \(T(t)\) exerted on disk \(J_{1}\) and a load torque \(T_{L}(t)\) exerted on disk \(J_{2}\). Both the applied torque \(T(t)\) and the load torque \(T_{L}(t)\) are considered as inputs and the output is the angular velocity \(\omega_{3}(t)\) (Figure 2.93).
(a) Draw the free-body diagrams for the system.
(b) Explain why the vector of state variables can be chosen as
\[\mathbf{x}(t)=\left[\begin{array}{llll}\theta_{2} & \theta_{3} & \omega_{1} & \omega_{3}\end{array}ight]^{T} .\]
(c) Express the dynamic equations in State-Variable Matrix model (i.e. obtain A, B, C, D).
(b) Use the s-operator method to express the dynamic equations in the form of an input-output differential equation.
Step by Step Answer:

This question has not been answered yet.
You can Ask your question!


Design And Analysis Of Control Systems Driving The Fourth Industrial Revolution
ISBN: 9781032718804
2nd Edition
Authors: Arthur G O Mutambara
