

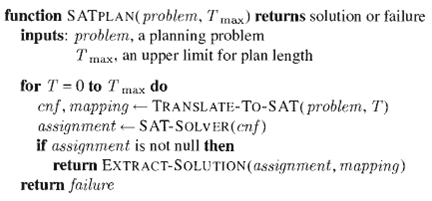
In the SATPLAN algorithm in Figure, each call to the satisfiability algorithm asserts a goal g T
Question:
In the SATPLAN algorithm in Figure, each call to the satisfiability algorithm asserts a goal g T where T ranges from 0 to Tmax. Suppose instead that the satisfiability algorithm is called only once, with the goal g0 V g1 V…. Vg T max
a. Will this always return a plan if one exists with length less than or equal to Tm?
b. Does this approach introduce any new spurious “solutions”?
c. Discuss how one might modify a satisfiability algorithm such as WALKSAT so that it finds short solutions (if they exist) when given a disjunctive goal of this form.
Fantastic news! We've Found the answer you've been seeking!
Step by Step Answer:
a Yes this will find a plan whenever the normal SATPLAN finds a ...View the full answer

Answered By
Marcus Solomon
I am committed to ensuring that my services always meet the clients' expectations.
82+ Reviews
117+ Question Solved
Related Book For 
Artificial Intelligence A Modern Approach
ISBN: 978-0137903955
2nd Edition
Authors: Stuart J. Russell and Peter Norvig
Question Posted:
