

The cruise control system for a car can be modelled as a single translational mass, as shown
Question:
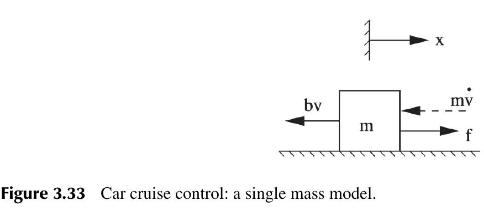
The cruise control system for a car can be modelled as a single translational mass, as shown in Figure 3.33. The input to the car system is the applied engine force \(f(t)\), which produces horizontal motion \(x(t)\) at speed \(v(t)\) and acceleration \(\dot{v}(t)\). The frictional force \(b v(t)\), which is proportional to the car's speed, opposes the car's motion.
(a) Show that the car speed cruise control Input-Output model is given by
\[\dot{v}(t)+\frac{b}{m} v(t)=\frac{b}{m} v_{r}(t)\]
where the reference or desired constant speed is given by \(v_{r}(t)=\frac{f(t)}{b}\).
(b) Determine the Transfer Function model of the car cruise control system, and explain why the model is considered a first-order system.
(c) If \(b=2 \mathrm{Ns} / \mathrm{m}\) and \(m=1 \mathrm{~kg}\), show that the car speed response is given by \[
v(t)=v_{r}(t)\left[1-e^{-2 t}ight]
\]
(d) If \(v_{r}(t)=1 \mathrm{~m} / \mathrm{s}\) draw a sketch of the car's speed response and deduce the following system parameters: time constant \(\tau\), rise time \(t_{r}\) and settling time \(t_{s}\).
Step by Step Answer:
a The cruise control system for a car can be modelled as a single translational mass as shown in Figure 333 The input to the car system is the applied ...View the full answer



Design And Analysis Of Control Systems Driving The Fourth Industrial Revolution
ISBN: 9781032718804
2nd Edition
Authors: Arthur G O Mutambara
