

Question: A robotic hand initially lies along the y-axis such that the direction of griping is in the z direction which is along the w
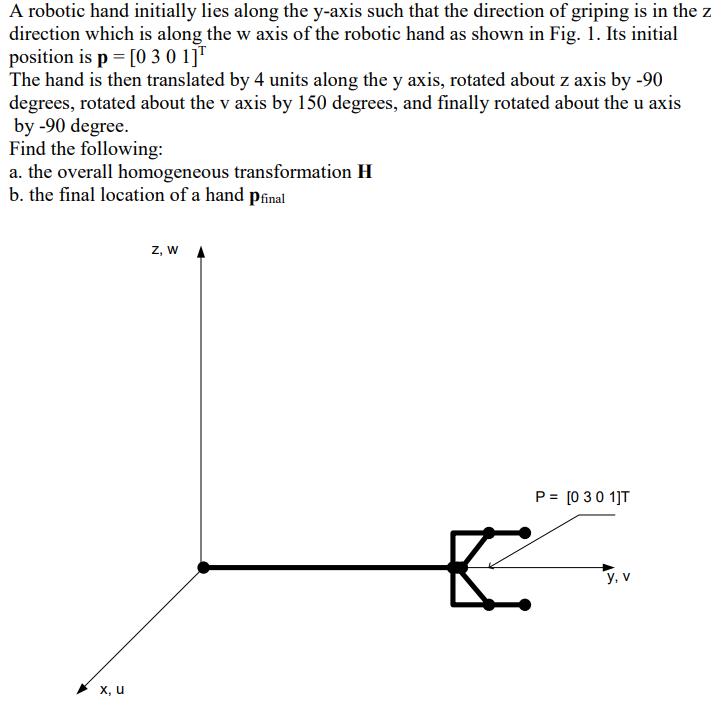
A robotic hand initially lies along the y-axis such that the direction of griping is in the z direction which is along the w axis of the robotic hand as shown in Fig. 1. Its initial position is p = [0 3 0 1] The hand is then translated by 4 units along the y axis, rotated about z axis by -90 degrees, rotated about the v axis by 150 degrees, and finally rotated about the u axis by -90 degree. Find the following: a. the overall homogeneous transformation H b. the final location of a hand pfinal X, U Z, W E P = [030 1]T y, v
Step by Step Solution
★★★★★
3.44 Rating (151 Votes )
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock