

Question: Below is a simple planar manipulator composed of two serial chains connected, where only Joints 1 and 3 are active (meaning that it has
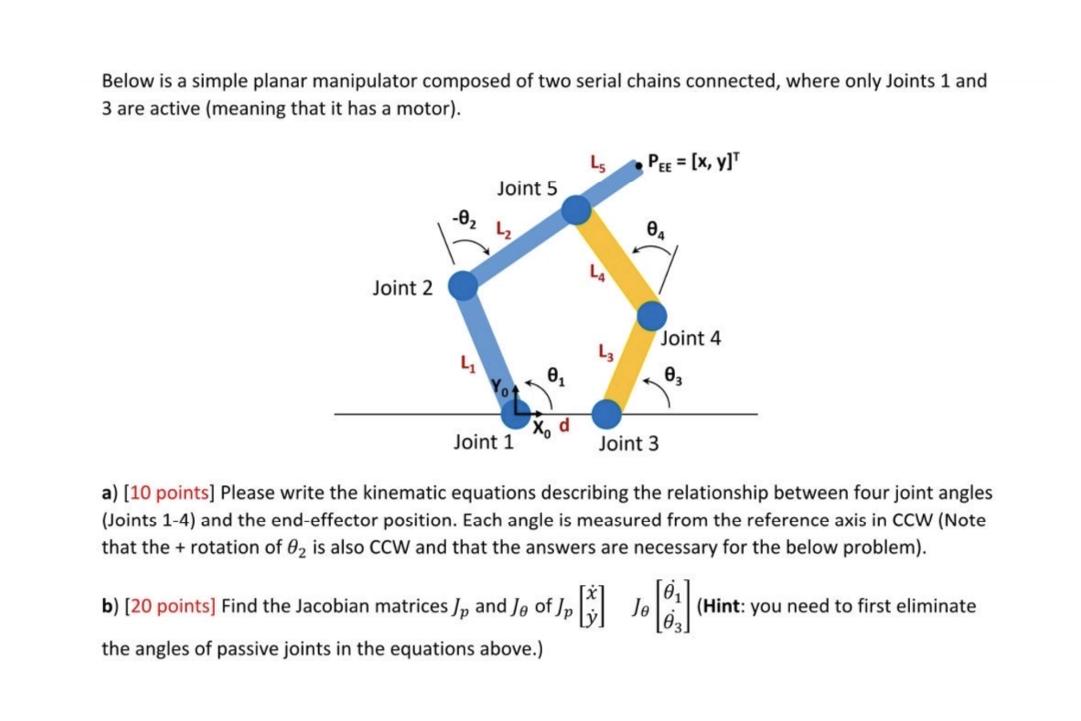
Below is a simple planar manipulator composed of two serial chains connected, where only Joints 1 and 3 are active (meaning that it has a motor). L5 Joint 5 84 O X, d Joint 2 Joint 1 PEE = [x, y] 0 Joint 4 03 Joint 3 a) [10 points] Please write the kinematic equations describing the relationship between four joint angles (Joints 1-4) and the end-effector position. Each angle is measured from the reference axis in CCW (Note that the + rotation of 02 is also CCW and that the answers are necessary for the below problem). b) [20 points] Find the Jacobian matrices Jp and J. of Jp Je Jo [0] the angles of passive joints in the equations above.) (Hint: you need to first eliminate
Step by Step Solution
3.44 Rating (151 Votes )
There are 3 Steps involved in it
Problem Overview The system is a planar closedchain manipulator composed of two serial chains connected at Joint 5 Only Joints 1 and 3 are active whil... View full answer

Get step-by-step solutions from verified subject matter experts