

A vehicle is trying to identify the situation of the world around it using a set of
Question:
A vehicle is trying to identify the situation of the world around it using a set of sensors located around the vehicle. Each sensor reading is based off of an object’s location (LOC) and an object’s movement (MOVE). The sensor reading will then produce various values for its predicted location, predicted movement, and image rendered, which is then sent back to the user. The vehicle takes an action, and we assign some utility to the action based on the object’s location and movement. Possible actions are MOVE TOWARDS, MOVE AWAY, and STOP.
a. For part (a) only, suppose the decision network faced by the vehicle is the following
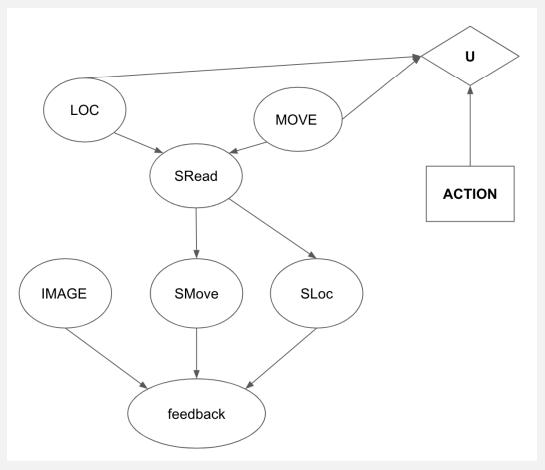
(i) Based on the diagram above, is it possiblely true that V P I(SMove, SRead) > V P I(SRead) ?
(ii) Based on the diagram above, is it necessarily true that V P I(SRead) = 0?
b. For the remainder of this problem, let’s assume that your startup has less money, so we use a simpler sensor network. One possible sensor network can be represented as follows.
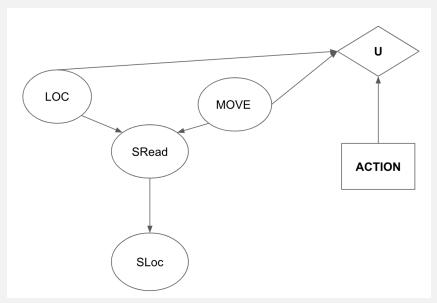
You have distributions of P(LOC), P(MOV E), P(SRead|LOC, MOV E), P(SLoc|SRead) and utility values U(ACT ION, LOC, MOV E). What is equation for determining the expected utility for some ACTION a?
c. Your colleague Bob invented a new sensor to observe values of SLoc.
(i) Suppose that your company had no sensors till this point. What is V P I(SLoc) in terms of the given distributions?
(ii) Gaagle, an established company, wants to sell your startup a device that gives you SRead. Given that you already have Bob’s device (that gives you SLoc), what is the maximum amount of money you should pay for Gaagle’s device? Suppose you value $1 at 1 utility. Please simplify your answer as much as possible.
Step by Step Answer:
a i No V P ISMove SRead V P ISMoveSRead V P ISRead therefore we can cancel ...View the full answer


Artificial Intelligence A Modern Approach
ISBN: 9780134610993
4th Edition
Authors: Stuart Russell, Peter Norvig
