

Question: A simple modified and linearized model for the transfer function of a certain bicycle from steer angle () to roll angle () is given by
A simple modified and linearized model for the transfer function of a certain bicycle from steer angle (δ) to roll angle (φ) is given by (Åstrom, 2005)
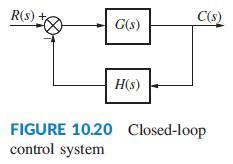
Assume the rider can be represented by a gain K, and that the closed-loop system is shown in Figure 10.20 with G(s)= KP(s) and H = 1.
Use MATLAB and the Nyquist stability criterion to find the range of K for closed-loop stability.
P(s)_ 12(s + 20) P(s) = 8(s) s2 + 25
Step by Step Solution
3.31 Rating (154 Votes )
There are 3 Steps involved in it
To use the Nyquist stability criterion we need to first obtain the transfer function of the closedlo... View full answer

Get step-by-step solutions from verified subject matter experts