

A simplified model of the steering of a four-wheel drive vehicle is shown in Figure P7.26. In
Question:
A simplified model of the steering of a four-wheel drive vehicle is shown in Figure P7.26.
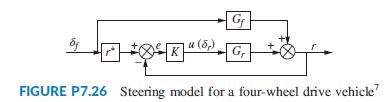
In this block diagram, the output r is the vehicle’s yaw rate, while δf and δr are the steering angles of the front and rear tires, respectively. In this model,
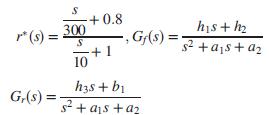
and K(s) is a controller to be designed. (Yin, 2007).
a. Assuming a step input for δf , find the minimum system type of the controller K(s) necessary so that in steady-state the error, as defined by the signal e in Figure P7.26, is zero if at all possible.
b. Assuming a step input for δf , find the system type of the controller K(s) necessary so that in steady state the error as defined by δf (∞) - r(∞) is zero if at all possible.
Fantastic news! We've Found the answer you've been seeking!
Step by Step Answer:

Answered By
BETHUEL RUTTO
Hi! I am a Journalism and Mass Communication graduate; I have written many academic essays, including argumentative essays, research papers, and literary analysis. I have also proofread and written reviews, summaries and analyses on already finished works. I am eager to continue writing!
1+ Reviews
10+ Question Solved
Related Book For 

Question Posted:
