

An active system for the elimination of floor vibrations due to human presence is presented in (Nyawako,
Question:
An active system for the elimination of floor vibrations due to human presence is presented in (Nyawako, 2009). The system consists of a sensor that measures the floor’s vertical acceleration and an actuator that changes the floor characteristics. The open-loop transmission of the particular setup used can be described by G(s) = KGa(s)F(s)Gm(s), where the actuator’s transfer function is
![]()
The floor’s dynamic characteristics can be modeled by
![]()
The sensor’s transfer function is
![]()
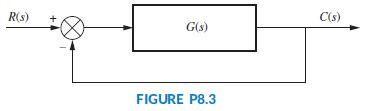
and K is the gain of the controller. The system operations can be described by the unity-gain feedback loop of Figure P8.3.
a. Use MATLAB’s SISO Design Tool to obtain the root locus of the system in terms of K.
b. Find the range of K for closed-loop stability.
c. Find, if possible, a value of K that will yield a closed-loop overdamped
response.
Step by Step Answer:
a To obtain the root locus of the system in terms of K you can use the SISO Design Tool in MATLAB Th...View the full answer



