

Question: Represent the system shown in Figure P3.4 in state space where the output is x 3 (t). X3(t) fvz = 1 N-s/m M3 = 1
Represent the system shown in Figure P3.4 in state space where the output is x3(t).
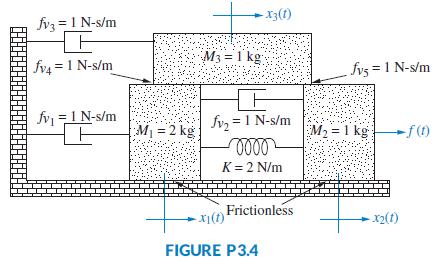
X3(t) fvz = 1 N-s/m M3 = 1 kg %3D fv4 = 1 N-s/m fvs = 1 N-s/m fv =1 N-s/m fvz = 1 N-s/m M1 = 2 kg M2 = 1 kg f() K= 2 N/m Frictionless -x2(1) FIGURE P3.4
Step by Step Solution
★★★★★
3.52 Rating (165 Votes )
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock