

Question: The differential equation model for a certain position control system for a metal cutting tool is where the actual tool position is x; the desired
The differential equation model for a certain position control system for a metal cutting tool is
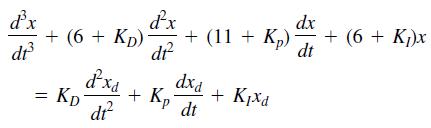
where the actual tool position is x; the desired position is xd (t); and Kp, KI, and KD are constants called the control gains. Use the Laplace transform method to find the unit-step response [that is, xd(t) is a unit-step function].
Use zero initial conditions. Compare the response for three cases.
a. Kp = 30, KI = KD = 0
b. Kp = 27, KI = 17.18, KD = 0
c. Kp = 36, KI = 38.1, KD = 8.52
dx + (6 + Kj)x dt d'x + (6 + Kp) ax dr + (11 + Kp) - dr dxa dxa = Kp + Kp + KjXd dt dr?
Step by Step Solution
3.50 Rating (177 Votes )
There are 3 Steps involved in it
ANSWER To find the unitstep response of the given system using the Laplace transform method we first ... View full answer

Get step-by-step solutions from verified subject matter experts