

Question: A machine tool is mounted on two nonlinear elastic mounts, as shown in Fig. 13.36. The equations of motion, in terms of the coordinates (x(t))
A machine tool is mounted on two nonlinear elastic mounts, as shown in Fig. 13.36. The equations of motion, in terms of the coordinates \(x(t)\) and \(\theta(t)\), are given by
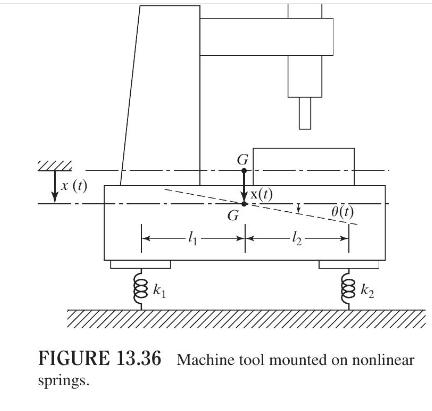
where \(m\) is the mass and \(J_{0}\) is the mass moment of inertia about \(G\) of the machine tool. Using the Runge-Kutta method, find \(x(t)\) and \(\theta(t)\) for the following data: \(m=1000 \mathrm{~kg}\), \(J_{0}=2500 \mathrm{~kg}-\mathrm{m}^{2}, l_{1}=1 \mathrm{~m}, l_{2}=1.5 \mathrm{~m}, k_{1}=40 x_{1}+10 x_{1}^{3} \mathrm{kN} / \mathrm{m}, \quad\) and \(\quad k_{2}=50 x_{2}+\) \(5 x_{2}^{3} \mathrm{kN} / \mathrm{m}\).
mx + k(x - 10) + k12(x 110) + k21(x + 120) + K22(x + 120) = 0 - - J k(x 10) 4 - 12(x - 10) 11 +k21(x+120) 2+ k22(x + 120) = 0 (E.1) (E.2)
Step by Step Solution
3.31 Rating (157 Votes )
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts