

Question: A first-order system is given by x(t)=-x(t)+u(t) with the initial condition x(0) = x0. We want to design a feedback controller u(t) = -kx(t) such
A first-order system is given by
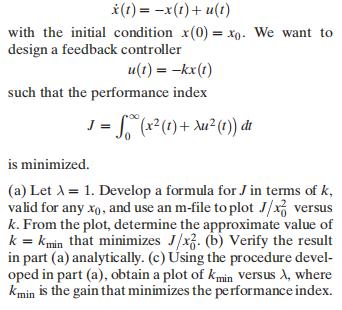
x(t)=-x(t)+u(t) with the initial condition x(0) = x0. We want to design a feedback controller u(t) = -kx(t) such that the performance index is minimized. J = f (x (1) + Au (1)) dt (a) Let = 1. Develop a formula for J in terms of k, valid for any xo, and use an m-file to plot J/x versus k. From the plot, determine the approximate value of k = kmin that minimizes J/x2. (b) Verify the result in part (a) analytically. (c) Using the procedure devel- oped in part (a), obtain a plot of kmin versus A, where kmin is the gain that minimizes the performance index.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock