

Question: An automatic depth-control system for a robot submarine is shown in Figure P3.7. The depth is measured by a pressure transducer. The gain of the
An automatic depth-control system for a robot submarine is shown in Figure P3.7. The depth is measured by a pressure transducer. The gain of the stern plane actuator is K = 1 when the vertical velocity is 25 m/s.
The submarine has the transfer function
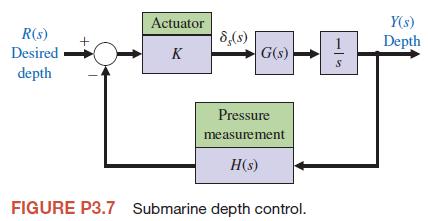
(s+ 2) G(s) = $2+2 and the feedback transducer is H(s)=s+3. Determine a state variable representation for the system.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock