

Question: CP11.11 Consider the third-order system x(t)= 01 0 0 0 0 1 x(t)+ -4.3 -1.7 -6.7 0 u(t) 0.35 y(t)=[010]x(t) +[0]u(t). (a) Using the acker
CP11.11 Consider the third-order system
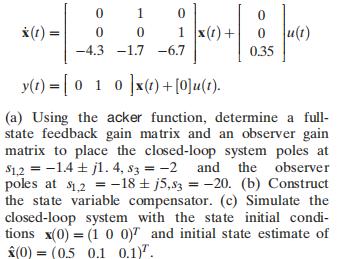
x(t)= 01 0 0 0 0 1 x(t)+ -4.3 -1.7 -6.7 0 u(t) 0.35 y(t)=[010]x(t) +[0]u(t). (a) Using the acker function, determine a full- state feedback gain matrix and an observer gain matrix to place the closed-loop system poles at $1,2 -1.4j1. 4, 83-2 and the observer -18j5,83 = -20. (b) Construct the state variable compensator. (c) Simulate the closed-loop system with the state initial condi- tions x(0) (10 0) and initial state estimate of (0) (0.5 0.1 0.1). poles at $1,2
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock