

Question: CP11.13 Consider the system in state variable form Design a full-state feedback gain matrix and an observer gain matrix to place the closed-loop sys tem
CP11.13 Consider the system in state variable form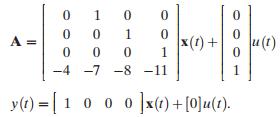
Design a full-state feedback gain matrix and an observer gain matrix to place the closed-loop sys
tem poles at s j 1,2 3 = −2 2 ± = , s j ,4 − ±5 and the observer poles s j 1,2 3 = −9 2 ± = , s ,4 −15.
Construct the state variable compensator, and simu
late the closed-loop system. Select several values of initial states and initial state estimates in the observer, and display the tracking results.
0 1 0 0 00 1 0 A 0 0 0 0 1 x(1) + u(t) 0 -4 -7-8-11 y(t)=1000]x(t) +[0]u(t).
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock