

Question: DP5.6 The model for a position control system using a DC motor is shown in Figure DP5.6. The goal is to select K 1 and
DP5.6 The model for a position control system using a DC motor is shown in Figure DP5.6. The goal is to select K1 and K2 so that the peak time is Tp ≤ 0.7 s, and the percent overshoot for a step input is
≤ 5%.
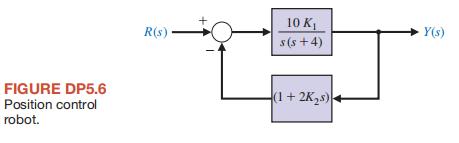
FIGURE DP5.6 Position control robot. R(s) 10 K s(s+4) (1+2Ks) Y(s)
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock