

Question: P11.20 Consider the automatic ship-steering system. The state variable form of the system differential equation is -0.06 -5 0 0. -0.1 -0.01 -0.2 -0.2 0
P11.20 Consider the automatic ship-steering system. The state variable form of the system differential equation is
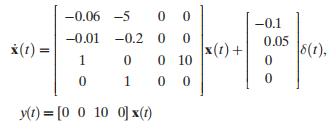
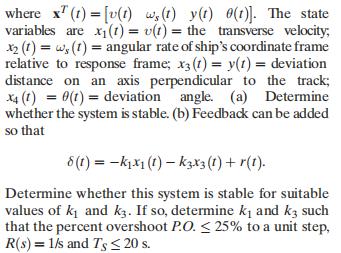
-0.06 -5 0 0. -0.1 -0.01 -0.2 -0.2 0 0 0.05 x (1) = x(1) + 8(1), 1 0 0 10 0 0 1 0 0 0 y(t)= [0 0 10 0] x(t)
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock