

Question: There has been considerable engineering effort directed at finding ways to perform manipulative operations in spacefor example, assembling a space station and acquiring target satellites.
There has been considerable engineering effort directed at finding ways to perform manipulative operations in space—for example, assembling a space station and acquiring target satellites. To perform such tasks, space shuttles carry a remote manipulator system (RMS) in the cargo bay [4, 12, 21]. The RMS has proven its effectiveness on recent shuttle missions, but now a new design approach can be considered—
a manipulator with inflatable arm segments.
Such a design might reduce manipulator weight by a factor of four while producing a manipulator that, prior to inflation, occupies only one-eighth as much space in the cargo bay as the present RMS.
The use of an RMS for constructing a space structure in the shuttle bay is shown in Figure P3.29(a), and a model of the flexible RMS arm is shown in Figure P3.29(b), where J is the inertia of the drive motor and L is the distance to the center of gravity of the load component. Derive the state equations for this system.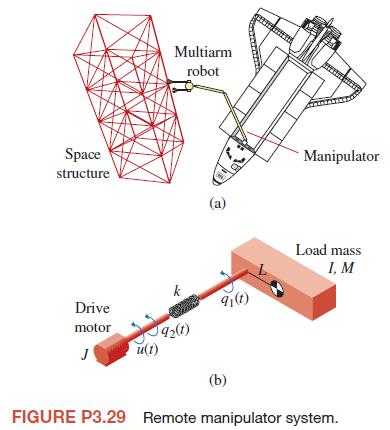
Space structure Multiarm robot Manipulator (a) Load mass I, M Drive 91(t) motor 92(1) J u(t) (b) FIGURE P3.29 Remote manipulator system.
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts