

Question: 0 7 : 5 1 Major Test 2 . pdf PLEASE NOTE: IF YOU HAVE THE OPINION THAT INSUFFICIENT INFORMATION IS SUPPLIED FOR YOU TO
:
Major Test pdf
PLEASE NOTE: IF YOU HAVE THE OPINION THAT INSUFFICIENT INFORMATION IS SUPPLIED FOR YOU TO ANSWER A PARTICULAR QUESTION, MAKE A REALISTIC ASSUMPTION, MOTIVATE IT AND THEN ANSWER THE QUESTION.
QUESTION
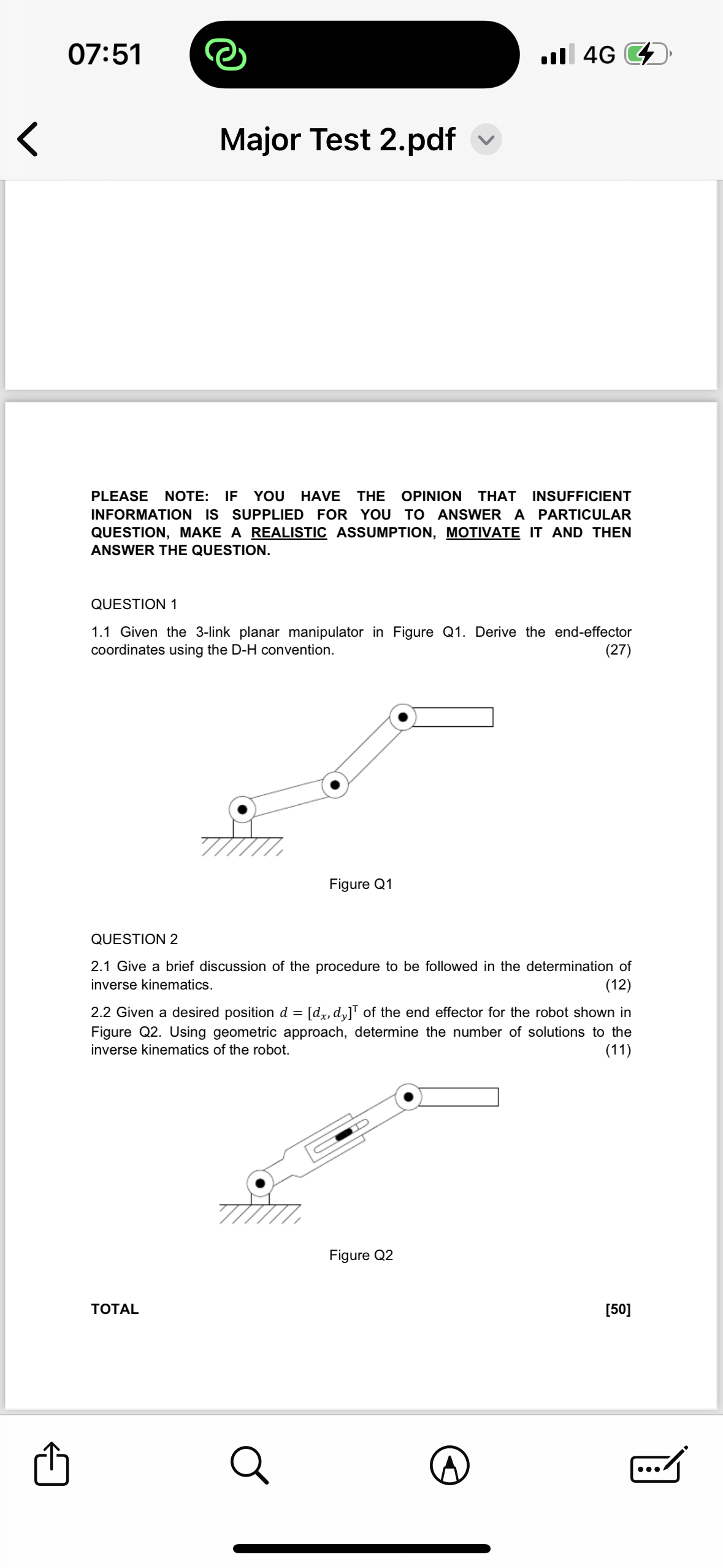
Given the link planar manipulator in Figure Q Derive the endeffector coordinates using the DH convention.
QUESTION
Give a brief discussion of the procedure to be followed in the determination of inverse kinematics.
Given a desired position of the end effector for the robot shown in Figure Q Using geometric approach, determine the number of solutions to the inverse kinematics of the robot.
TOTAL
i
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock