

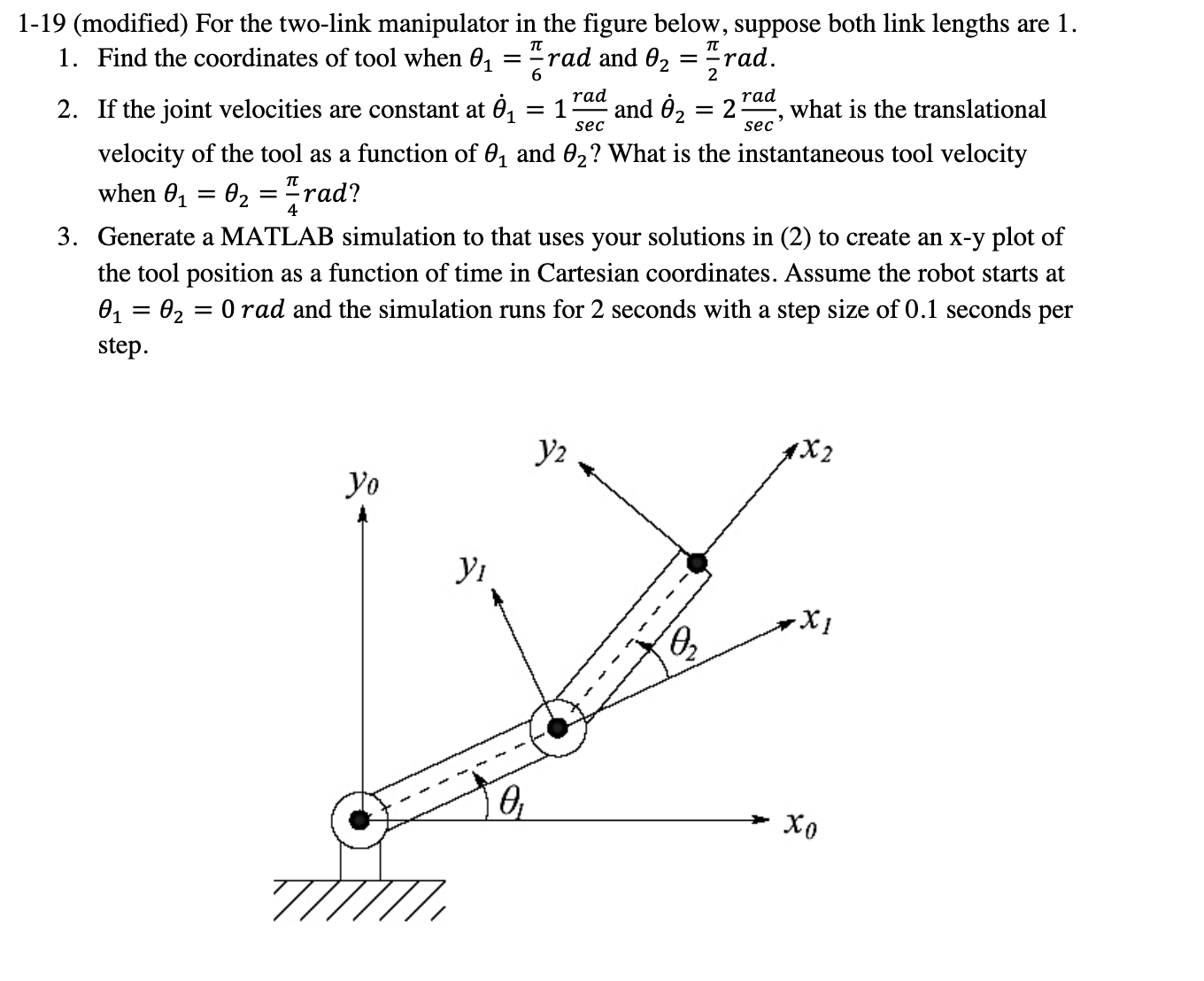
Question: 1 - 1 9 ( modified ) For the two - link manipulator in the figure below, suppose both link lengths are 1 . Find
modified For the twolink manipulator in the figure below, suppose both link lengths are
Find the coordinates of tool when rad and rad.
If the joint velocities are constant at and what is the translational velocity of the tool as a function of and What is the instantaneous tool velocity when rad?
Generate a MATLAB simulation to that uses your solutions in to create an xy plot of the tool position as a function of time in Cartesian coordinates. Assume the robot starts at rad and the simulation runs for seconds with a step size of seconds per step.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock