

Question: 1 . A magnetic levitation system is shown below: a . Design a PD compensator ( G _ { c } ( s )
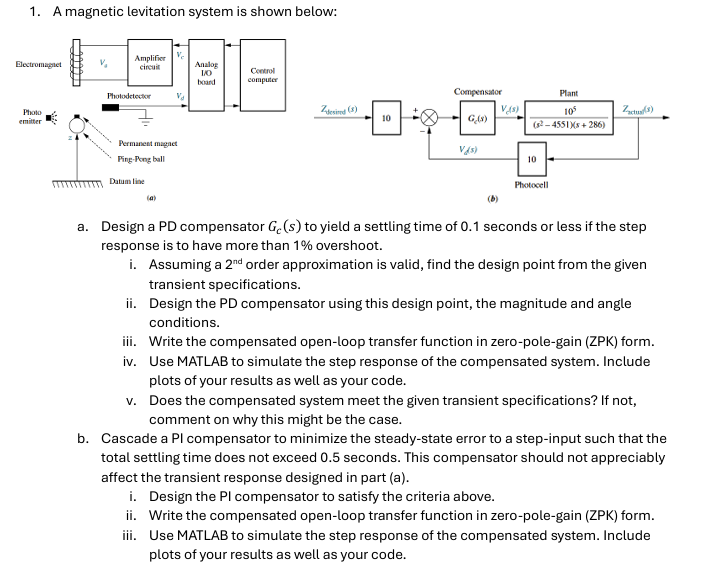
A magnetic levitation system is shown below:
a Design a PD compensator Gcs to yield a settling time of seconds or less if the step response is to have more than overshoot.
i Assuming a text nd order approximation is valid, find the design point from the given transient specifications.
ii Design the PD compensator using this design point, the magnitude and angle conditions.
iii. Write the compensated openloop transfer function in zeropolegain ZPK form.
iv Use MATLAB to simulate the step response of the compensated system. Include plots of your results as well as your code.
v Does the compensated system meet the given transient specifications? If not, comment on why this might be the case.
b Cascade a PI compensator to minimize the steadystate error to a stepinput such that the total settling time does not exceed seconds. This compensator should not appreciably affect the transient response designed in part a
i Design the PI compensator to satisfy the criteria above.
ii Write the compensated openloop transfer function in zeropolegain ZPK form.
iii. Use MATLAB to simulate the step response of the compensated system. Include plots of your results as well as your code.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock