

Question: 1. A robot is moving in a 2D planar world coordinate plane. Starting from the initial point, the robot has reached point (4, 5)
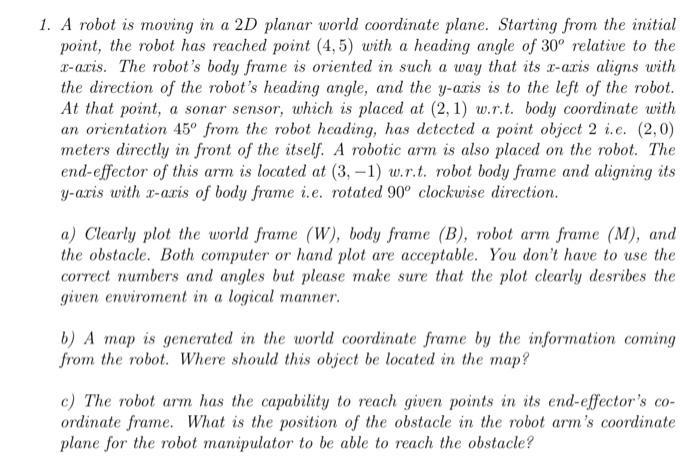
1. A robot is moving in a 2D planar world coordinate plane. Starting from the initial point, the robot has reached point (4, 5) with a heading angle of 30 relative to the x-axis. The robot's body frame is oriented in such a way that its x-axis aligns with the direction of the robot's heading angle, and the y-axis is to the left of the robot. At that point, a sonar sensor, which is placed at (2, 1) w.r.t. body coordinate with an orientation 45 from the robot heading, has detected a point object 2 i.e. (2,0) meters directly in front of the itself. A robotic arm is also placed on the robot. The end-effector of this arm is located at (3,-1) w.r.t. robot body frame and aligning its y-axis with x-axis of body frame i.e. rotated 90 clockwise direction. a) Clearly plot the world frame (W), body frame (B), robot arm frame (M), and the obstacle. Both computer or hand plot are acceptable. You don't have to use the correct numbers and angles but please make sure that the plot clearly desribes the given enviroment in a logical manner. b) A map is generated in the world coordinate frame by the information coming from the robot. Where should this object be located in the map? c) The robot arm has the capability to reach given points in its end-effector's co- ordinate frame. What is the position of the obstacle in the robot arm's coordinate plane for the robot manipulator to be able to reach the obstacle?
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts