

Question: 1 b ) Implement a discrete - time unicycle kinematic model In lecture, we gave the continuous time kinematic model for a unicycle in the
b Implement a discretetime unicycle kinematic model
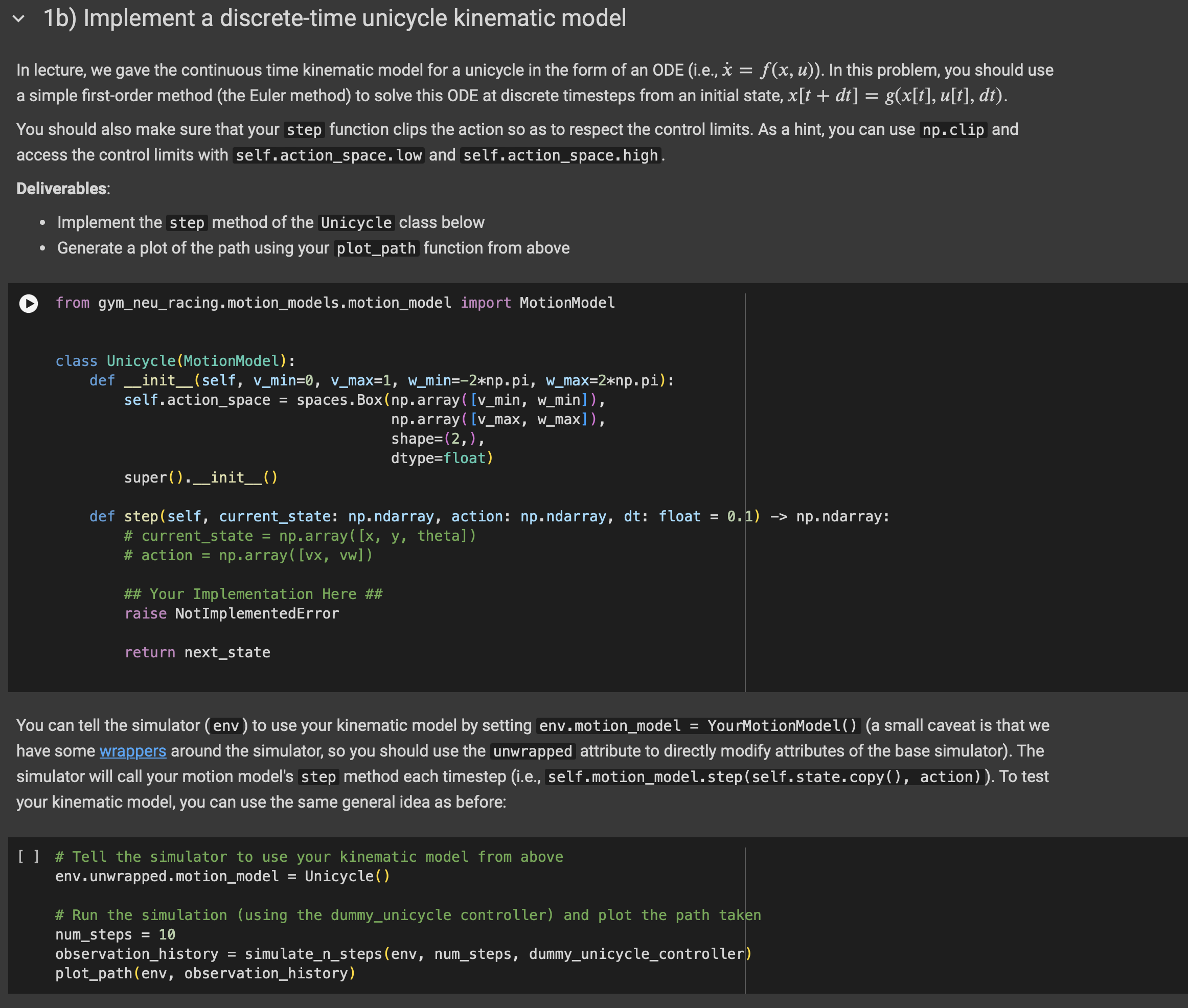
In lecture, we gave the continuous time kinematic model for a unicycle in the form of an ODE ie In this problem, you should use
a simple firstorder method the Euler method to solve this ODE at discrete timesteps from an initial state,
You should also make sure that your step function clips the action so as to respect the control limits As a hint, you can use npclip and
access the control limits with self.actionspace. low and self.actionspace.high.
Deliverables:
Implement the step method of the Unicycle class below
Generate a plot of the path using your plotpath function from above
diamond from gymneuracing.motionmodels.motionmodel import MotionModel
class UnicycleMotionModel:
def self vmin vmax wminnppi:
self.actionspace spaces.
nparray :max,max
shape
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock